Filtr grzebieniowy
Filtr grzebieniowy – jeden z podstawowych rodzajów filtrów stosowanych w przetwarzaniu sygnału. Jego działanie polega na dodawaniu sygnału do jego opóźnionej wersji, co powoduje wzmacnianie, bądź wygaszanie poszczególnych składowych częstotliwościowych poprzez zjawisko interferencji. W charakterystyce częstotliwościowej filtra grzebieniowego występują regularnie powtarzające się minima (ang. notch) nadające jej wygląd „grzebienia”.
Zastosowania
Spośród licznych zastosowań filtrów grzebieniowych wymienić można:
- Kaskadowe filtry całkująco-grzebieniowe (ang. cascaded integrator-comb filters, CIC), szeroko stosowane do zapobiegania aliasingowi w operacjach interpolacji i decymacji, zmieniających częstotliwość próbkowania w systemach czasu dyskretnego.
- Filtry grzebieniowe 2D i 3D implementowane sprzętowo (rzadziej programowo) w dekoderach systemu PAL i NTSC. Ich zadaniem jest redukcja artefaktów typu „dot crawl”.
- Efekty dźwiękowe, takie jak np. echo czy flanger oraz falowodowa synteza dźwięku. Przykładowo, dla opóźnienia rzędu kilku milisekund, filtr grzebieniowy może być użyty do modelowania efektu akustycznej fali stojącej w cylindrycznej komorze rezonansowej bądź w drgającej strunie.
- W astronomii, tzw. „astro-comb” może potencjalnie zwiększyć precyzję istniejących spektrografów niemal stukrotnie.
W akustyce, filtracja grzebieniowa występuje niekiedy samorzutnie (i zwykle jest niepożądana). Przykładowo, jeśli dwa głośniki odtwarzają ten sam sygnał w różnej odległości od słuchacza, wystąpi efekt filtracji grzebieniowej[1]. Ponadto, w każdej zamkniętej przestrzeni, słuchacz odbiera mieszaninę dźwięków bezpośrednich i odbitych od ścian, podłogi, sufitu, mebli i innych przedmiotów. Ponieważ dźwięk odbity przebywa dłuższą drogę do słuchacza, stanowi tym samym opóźnioną wersję dźwięku bezpośredniego, co również powoduje wystąpienie efektu filtracji grzebieniowej[2].
Szczegóły techniczne
Filtry grzebieniowe występują w dwóch podstawowych postaciach: bez sprzężenia zwrotnego i ze sprzężeniem zwrotnym i mogą być implementowane jako filtry cyfrowe bądź analogowe. Zostanie tu szczegółowo omówiony przypadek cyfrowy (przypadek analogowy opisuje się podobnie).
Filtr grzebieniowy bez sprzężenia zwrotnego

Schemat blokowy cyfrowego filtru grzebieniowego bez sprzężenia zwrotnego (blok oznacza opóźnienie sygnału o próbek)



Ogólna struktura filtru tego typu przedstawiona jest na powyższym schemacie, a jego odpowiedź określa równanie różnicowe:

gdzie jest opóźnieniem (mierzonym liczbą próbek), zaś jest współczynnikiem skalującym określającym stopień wzmocnienia/wygaszenia sygnału opóźnionego.


Stosując transformację do obu stron tego równania otrzymuje się:


skąd oblicza się transmitancję:

Charakterystyka częstotliwościowa
Charakterystykę częstotliwościową układu dyskretnego otrzymuje się rozważając jego funkcję transmitancji dla argumentów leżących na okręgu jednostkowym w dziedzinie tj. dla A zatem, dla tego filtru grzebieniowego bez sprzężenia zwrotnego otrzymuje się:



Stosując wzór Eulera otrzymuje się równoważnie:

Obliczając moduł powyższego wyrażenia otrzymuje się charakterystykę amplitudową filtru:

skąd ostatecznie:

Zauważając, że składnik jest stały, podczas gdy zmienia się okresowo wraz ze zmianą A zatem odpowiedź amplitudowa filtru grzebieniowego jest okresowa, z okresem




Przykłady
Na poniższym rysunku przedstawiono charakterystykę amplitudową filtru grzebieniowego dla i kilku wybranych wartości Jednostką osi odciętych jest znormalizowana częstotliwość (a zatem wartości odpowiada częstotliwość próbkowania sygnału dyskretnego, a wartości – częstotliwość Nyquista).







Zauważając, że dla powyższego przykładu ( ) pierwsze minimum charakterystyki filtru występuje w punkcie co odpowiada sygnałowi o okresie czterech próbek (tzn. o częstotliwości mniejszej niż częstotliwość próbkowania). Istotnie, jeśli uwzględni się fakt, że opóźnienie o próbki oznacza dla tego sygnału po prostu odwrócenie fazy, to łatwo zauważyć, iż po zsumowaniu z sygnałem oryginalnym otrzyma się sygnał zerowy (dla ). Dla uzyskane wygaszenie sygnału będzie częściowe.






Dla sygnału o maksymalnej częstotliwości (połowa częstotliwości próbkowania, i.e. dwie próbki na okres) jego opóźnienie o próbki daje sygnał oryginalny, a zatem dla na wyjściu sumatora otrzyma się sygnał o dwukrotnie większej amplitudzie. Odpowiada to widocznemu maksimum charakterystyki dla

Na kolejnym rysunku zaprezentowano przypadek gdy


Zauważając, że minima charakterystyki odpowiadają maksimom z rysunku (dla ) i vice versa. Dla minima występują dla częstotliwości:

gdzie to częstotliwość próbkowania sygnału.

Zauważając też, że wartości w minimach i maksimach charakterystyki amplitudowej są równoodległe od jedności, a w przypadku gdy minima osiągają wartość zero.

Odpowiedź impulsowa
Filtr grzebieniowy bez sprzężenia zwrotnego jest jednym z najprostszych filtrów o skończonej odpowiedzi impulsowej[3]. Jego odpowiedź impulsowa składa się po prostu z wyjściowego impulsu powtórzonego po próbkach.
Bieguny i zera transmitancji
Rozważając licznik i mianownik funkcji transmitancji filtru grzebieniowego bez sprzężenia zwrotnego:

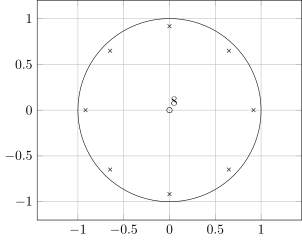
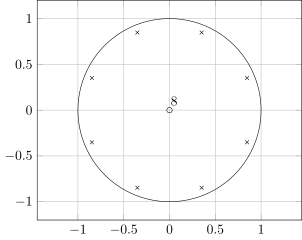
należy zauważyć, że mianownik ma miejsce zerowe (biegun transmitancji) dla zaś miejsca zerowe licznika (zera transmitancji) występują dla takich dla których Ich liczba wynosi dokładnie jak widać na rysunkach poniżej, a ich położenia pokrywają się z minimami charakterystyki częstotliwościowej. Zauważając, że dla zera transmitancji odpowiadają zespolonym pierwiastkom -tego stopnia z jedności.




-
 Bieguny i zera transmitancji filtra grzebieniowego bez sprzężenia zwrotnego, dla i
Bieguny i zera transmitancji filtra grzebieniowego bez sprzężenia zwrotnego, dla i -
 Bieguny i zera transmitancji filtra grzebieniowego bez sprzężenia zwrotnego, dla i
Bieguny i zera transmitancji filtra grzebieniowego bez sprzężenia zwrotnego, dla i





Filtr grzebieniowy ze sprzężeniem zwrotnym

Schemat blokowy cyfrowego filtru grzebieniowego ze sprzężeniem zwrotnym (blok oznacza opóźnienie sygnału o próbek)

Ten wariant filtru grzebieniowego charakteryzuje następujące równanie różnicowe:

Przekształcając to równanie tak, aby mieć wszystkie składniki zależne od sygnału wyjściowego po lewej stronie i stosując transformację do obu stron otrzymuje się:


skąd oblicza się transmitancję:

Charakterystyka częstotliwościowa

Podstawiając we wzorze na transmitancję otrzymuje się charakterystykę częstotliwościową filtru ze sprzężeniem zwrotnym:


Analogicznie jak dla wersji bez sprzężenia zwrotnego, pamiętając że moduł odwrotności liczby zespolonej, to odwrotność modułu, otrzymuje się charakterystykę amplitudową:

Jest ona okresowa, podobnie jak w przypadku bez sprzężenia zwrotnego i podobnie jak tam maksima dla dodatnich wartości odpowiadają minimom dla ujemnych i vice versa. Dla maksima występują dla częstotliwości:

gdzie to częstotliwość próbkowania sygnału.

W przeciwieństwie do filtru bez sprzężenia zwrotnego, wartości w minimach i maksimach charakterystyki amplitudowej nie są tu równoodległe od jedności (maksima przyjmują wartość ). Zauważając też, że sprzężenie zwrotne powoduje, że filtr jest stabilny tylko dla a wraz ze wzrostem wartości od 0 do 1, amplituda maksimów gwałtownie rośnie.



Odpowiedź impulsowa
Filtr grzebieniowy ze sprzężeniem zwrotnym to prosty filtr o nieskończonej odpowiedzi impulsowej[4]. Jeżeli jest stabilny, jego odpowiedź impulsowa składa się z ciągu powtarzających się impulsów o amplitudzie stopniowo malejącej wraz z czasem.
Bieguny i zera transmitancji
Z uwagi na postać wielomianu w mianowniku funkcji transmitancji:
należy zauważyć, że jego miejsca zerowe (bieguny transmitancji) występują dla takich dla których Ich liczba wynosi dokładnie jak widać na rysunkach poniżej, a ich położenia pokrywają się z maksimami charakterystyki częstotliwościowej. Dla bieguny transmitancji znajdują się wewnątrz okręgu jednostkowego na płaszczyźnie zespolonej, a zatem filtr jest stabilny. Licznik transmitancji przyjmuje wartość 0, gdy co daje zer funkcji transmitancji w punkcie




-
 Bieguny i zera transmitancji filtra grzebieniowego ze sprzężeniem zwrotnym, dla i
Bieguny i zera transmitancji filtra grzebieniowego ze sprzężeniem zwrotnym, dla i -
 Bieguny i zera transmitancji filtra grzebieniowego ze sprzężeniem zwrotnym, dla i
Bieguny i zera transmitancji filtra grzebieniowego ze sprzężeniem zwrotnym, dla i


Analogowe filtry grzebieniowe
Filtr grzebieniowy może być również zdefiniowany jako układ z czasem ciągłym. Filtr bez sprzężenia zwrotnego opisuje się następująco:

gdzie opóźnienie wyrażone jest w sekundach (a nie w liczbie próbek, jak w przypadku dyskretnym). Transmitancja tego filtru:


charakteryzuje się występowaniem nieskończonej liczby zer wzdłuż osi Filtr ze sprzężeniem zwrotnym:


posiada funkcję transmitancji w postaci:

charakteryzującą się występowaniem nieskończonej liczby biegunów wzdłuż osi
Zobacz też
Przypisy
- ↑ [1] Roger Russell. „Hearing, Columns and Comb Filtering”. Retrieved 2010-04-22.
- ↑ [2] „Acoustic Basics”, Acoustic Sciences Corporation. Retrieved 2010-04-22.
- ↑ [3] Julius O. Smith, „Feedforward Comb Filters”. Retrieved 2017-10-09.
- ↑ [4] Julius O. Smith, „Feedback Comb Filters”. Retrieved 2017-10-09.








