連続体力学 において、有限変形理論 (ゆうげんへんけいりろん、finite strain theory)は、物体(連続体)のひずみや回転が無限小ひずみ理論における前提では通用しないような deformationsである場合を扱う。本理論の対象となるような状態においては、連続体の状態は、変形の前後で大きく異なるので、変形前後を明確に区別する必要がある。対象としては、エラストマー 、塑性変形材料などの流体 、生物学 で見られるような軟組織 ケースである。有限変形理論は、物体 の変形の理論の一つで、微小変形理論と並立する[1] [2]
Figure 1. 連続体の運動 物体の変位は、剛体変位と変形の2つの要素から構成される。
剛体変位は、形状や大きさを変えずに、並進(物理)や回転を組み合わせた変位である。 変形は、初期状態(変形していない状態; κ 0 ( B ) {\displaystyle \kappa _{0}({\mathcal {B}})} κ t ( B ) {\displaystyle \kappa _{t}({\mathcal {B}})} 連続体の配置の変化は 変位場 によって記述することができる。変位場とは、物体中のすべての粒子の変位ベクトルを集めたベクトル場 であり、変形後の配置と変形前の配置を関連づける。任意の2つの粒子間の距離は、変形が起こった場合にのみ変化する。変形を伴わない変位は剛体変位と呼ばれる。
変数j でラベルされた粒子の変位は次のように表すことができる; 変形前の配置 P j {\displaystyle P_{j}} p j {\displaystyle p_{j}}
P j {\displaystyle P_{j}} X {\displaystyle \mathbf {X} } p j {\displaystyle p_{j}} x {\displaystyle \mathbf {x} } ラグランジュ記述 となる。即ち、
u ( X , t ) = u i e i {\displaystyle \mathbf {u} (\mathbf {X} ,t)=u_{i}\mathbf {e} _{i}}
ここで、 e i {\displaystyle \mathbf {e} _{i}}
物質座標で表すと( u {\displaystyle \mathbf {u} } X {\displaystyle \mathbf {X} }
u ( X , t ) = b ( t ) + x ( X , t ) − X or u i = α i J b J + x i − α i J X J {\displaystyle \mathbf {u} (\mathbf {X} ,t)=\mathbf {b} (t)+\mathbf {x} (\mathbf {X} ,t)-\mathbf {X} \qquad {\text{or}}\qquad u_{i}=\alpha _{iJ}b_{J}+x_{i}-\alpha _{iJ}X_{J}}
ここで、 b ( t ) {\displaystyle \mathbf {b} (t)}
変位ベクトルの物質座標に対する偏微分 から物質変形勾配テンソル(material displacement gradient tensor ) ∇ X u {\displaystyle \nabla _{\mathbf {X} }\mathbf {u} \,\!} ∇ X u = ∇ X x − R = F − R or ∂ u i ∂ X K = ∂ x i ∂ X K − α i K = F i K − α i K {\displaystyle \nabla _{\mathbf {X} }\mathbf {u} =\nabla _{\mathbf {X} }\mathbf {x} -\mathbf {R} =\mathbf {F} -\mathbf {R} \qquad {\text{or}}\qquad {\frac {\partial u_{i}}{\partial X_{K}}}={\frac {\partial x_{i}}{\partial X_{K}}}-\alpha _{iK}=F_{iK}-\alpha _{iK}}
ここで F {\displaystyle F}
オイラー表記の連続体力学において、変形前の配置にある粒子 P {\displaystyle P}
U ( x , t ) = U J E J {\displaystyle \mathbf {U} (\mathbf {x} ,t)=U_{J}\mathbf {E} _{J}}
ここで、 < E i > {\displaystyle <\mathbf {E} _{i}>}
空間座標で表現すると(つまり、 U {\displaystyle \mathbf {U} } x {\displaystyle \mathbf {x} }
U ( x , t ) = b ( t ) + x − X ( x , t ) or U J = b J + α J i x i − X J {\displaystyle \mathbf {U} (\mathbf {x} ,t)=\mathbf {b} (t)+\mathbf {x} -\mathbf {X} (\mathbf {x} ,t)\qquad {\text{or}}\qquad U_{J}=b_{J}+\alpha _{Ji}x_{i}-X_{J}}
変位ベクトルを空間座標に関して偏微分すると、空間変位勾配テンソル ∇ x U {\displaystyle \nabla _{\mathbf {x} }\mathbf {U} \,\!}
このようにして我々は、以下を得る。 ∇ x U = R T − ∇ x X = R T − F − 1 or ∂ U J ∂ x k = α J k − ∂ X J ∂ x k = α J k − F J k − 1 . {\displaystyle \nabla _{\mathbf {x} }\mathbf {U} =\mathbf {R} ^{T}-\nabla _{\mathbf {x} }\mathbf {X} =\mathbf {R} ^{T}-\mathbf {F} ^{-1}\qquad {\text{or}}\qquad {\frac {\partial U_{J}}{\partial x_{k}}}=\alpha _{Jk}-{\frac {\partial X_{J}}{\partial x_{k}}}=\alpha _{Jk}-F_{Jk}^{-1}\,.}
α J i {\displaystyle \alpha _{Ji}} E J {\displaystyle \mathbf {E} _{J}} e i {\displaystyle \mathbf {e} _{i}\,\!}
E J ⋅ e i = α J i = α i J {\displaystyle \mathbf {E} _{J}\cdot \mathbf {e} _{i}=\alpha _{Ji}=\alpha _{iJ}}
u i {\displaystyle u_{i}} U J {\displaystyle U_{J}}
u i = α i J U J or U J = α J i u i {\displaystyle u_{i}=\alpha _{iJ}U_{J}\qquad {\text{or}}\qquad U_{J}=\alpha _{Ji}u_{i}}
以下を踏まえると、 e i = α i J E J {\displaystyle \mathbf {e} _{i}=\alpha _{iJ}\mathbf {E} _{J}} u ( X , t ) = u i e i = u i ( α i J E J ) = U J E J = U ( x , t ) {\displaystyle \mathbf {u} (\mathbf {X} ,t)=u_{i}\mathbf {e} _{i}=u_{i}(\alpha _{iJ}\mathbf {E} _{J})=U_{J}\mathbf {E} _{J}=\mathbf {U} (\mathbf {x} ,t)}
変形と未変形の座標系を重ね合わせるのが一般的で、その結果 b = 0 {\displaystyle \mathbf {b} =0\,\!} クロネッカーのデルタ となる、すなわち、 E J ⋅ e i = δ J i = δ i J {\displaystyle \mathbf {E} _{J}\cdot \mathbf {e} _{i}=\delta _{Ji}=\delta _{iJ}}
したがって、物質座標(変形していない)では、変位は次のように表すことができる: E J ⋅ e i = δ J i = δ i J {\displaystyle \mathbf {E} _{J}\cdot \mathbf {e} _{i}=\delta _{Ji}=\delta _{iJ}}
また、空間座標(変形している)では、変位は次のように表すことができる: U ( x , t ) = x − X ( x , t ) or U J = δ J i x i − X J {\displaystyle \mathbf {U} (\mathbf {x} ,t)=\mathbf {x} -\mathbf {X} (\mathbf {x} ,t)\qquad {\text{or}}\qquad U_{J}=\delta _{Ji}x_{i}-X_{J}}
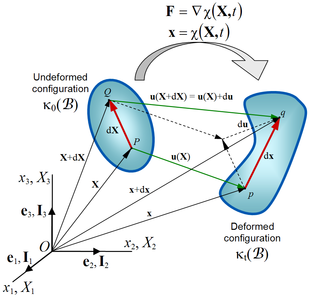
Figure 2. Deformation of a continuum body. 変形勾配テンソルは以下の式で表される。 F ( X , t ) = F j K e j ⊗ I K {\displaystyle \mathbf {F} (\mathbf {X} ,t)=F_{jK}\mathbf {e} _{j}\otimes \mathbf {I} _{K}} e j {\displaystyle \mathbf {e} _{j}} I K {\displaystyle \mathbf {I} _{K}\,\!} two-point tensor である。
χ ( X , t ) {\displaystyle \chi (\mathbf {X} ,t)\,\!} F {\displaystyle \mathbf {F} } H = F − 1 {\displaystyle \mathbf {H} =\mathbf {F} ^{-1}\,\!} H {\displaystyle \mathbf {H} } 空間変形勾配テンソル(spatial deformation gradient tensor) である。ここで、陰関数定理 [3] ヤコビアン (即ち、 | J ( X , t ) | {\displaystyle |J(\mathbf {X} ,t)|} 非退化 (即ち、 | J ( X , t ) | = det F ( X , t ) ≠ 0 {\displaystyle |J(\mathbf {X} ,t)|=\det \mathbf {F} (\mathbf {X} ,t)\neq 0}
物質変形勾配テンソル (Material deformation gradient tensor) F ( X , t ) = F j K e j ⊗ I K {\displaystyle \mathbf {F} (\mathbf {X} ,t)=F_{jK}\mathbf {e} _{j}\otimes \mathbf {I} _{K}} χ ( X , t ) {\displaystyle \chi (\mathbf {X} ,t)\,\!} X {\displaystyle \mathbf {X} \,\!} χ ( X , t ) {\displaystyle \chi (\mathbf {X} ,t)\,\!} 線形変換 )することによって、隣接する点での変形を行う。 X {\displaystyle \mathbf {X} } t {\displaystyle t\,\!} t {\displaystyle t\,\!}
このようにして、我々は以下を得る。 d x = ∂ x ∂ X d X or d x j = ∂ x j ∂ X K d X K = ∇ χ ( X , t ) d X or d x j = F j K d X K . = F ( X , t ) d X {\displaystyle {\begin{aligned}d\mathbf {x} &={\frac {\partial \mathbf {x} }{\partial \mathbf {X} }}\,d\mathbf {X} \qquad &{\text{or}}&\qquad dx_{j}={\frac {\partial x_{j}}{\partial X_{K}}}\,dX_{K}\\&=\nabla \chi (\mathbf {X} ,t)\,d\mathbf {X} \qquad &{\text{or}}&\qquad dx_{j}=F_{jK}\,dX_{K}\,.\\&=\mathbf {F} (\mathbf {X} ,t)\,d\mathbf {X} \end{aligned}}}
変形していない構成(図2)において、位置ベクトル X = X I I I {\displaystyle \mathbf {X} =X_{I}\mathbf {I} _{I}} P {\displaystyle P} p {\displaystyle p} x = x i e i {\displaystyle \mathbf {x} =x_{i}\mathbf {e} _{i}\,\!}
ここで、 P {\displaystyle P\,\!} Q {\displaystyle Q} X + Δ X = ( X I + Δ X I ) I I {\displaystyle \mathbf {X} +\Delta \mathbf {X} =(X_{I}+\Delta X_{I})\mathbf {I} _{I}\,\!}
変形された構成では、この粒子は、位置ベクトル x + Δ x {\displaystyle \mathbf {x} +\Delta \mathbf {x} \,\!} q {\displaystyle q} P {\displaystyle P} Q {\displaystyle Q} Δ X {\displaystyle \Delta X} Δ x {\displaystyle \Delta \mathbf {x} } d X {\displaystyle d\mathbf {X} } d x {\displaystyle d\mathbf {x} \,\!} x + d x = X + d X + u ( X + d X ) d x = X − x + d X + u ( X + d X ) = d X + u ( X + d X ) − u ( X ) = d X + d u {\displaystyle {\begin{aligned}\mathbf {x} +d\mathbf {x} &=\mathbf {X} +d\mathbf {X} +\mathbf {u} (\mathbf {X} +d\mathbf {X} )\\d\mathbf {x} &=\mathbf {X} -\mathbf {x} +d\mathbf {X} +\mathbf {u} (\mathbf {X} +d\mathbf {X} )\\&=d\mathbf {X} +\mathbf {u} (\mathbf {X} +d\mathbf {X} )-\mathbf {u} (\mathbf {X} )\\&=d\mathbf {X} +d\mathbf {u} \\\end{aligned}}}
ここで、 d u {\displaystyle \mathbf {du} } 相対変位ベクトル であり、変形された構成における P {\displaystyle P} Q {\displaystyle Q}
無限小要素 d X {\displaystyle d\mathbf {X} \,\!} P {\displaystyle P\,\!} テイラー展開 を用いて、隣接粒子 Q {\displaystyle Q}
u ( X + d X ) = u ( X ) + d u or u i ∗ = u i + d u i ≈ u ( X ) + ∇ X u ⋅ d X or u i ∗ ≈ u i + ∂ u i ∂ X J d X J . {\displaystyle {\begin{aligned}\mathbf {u} (\mathbf {X} +d\mathbf {X} )&=\mathbf {u} (\mathbf {X} )+d\mathbf {u} \quad &{\text{or}}&\quad u_{i}^{*}=u_{i}+du_{i}\\&\approx \mathbf {u} (\mathbf {X} )+\nabla _{\mathbf {X} }\mathbf {u} \cdot d\mathbf {X} \quad &{\text{or}}&\quad u_{i}^{*}\approx u_{i}+{\frac {\partial u_{i}}{\partial X_{J}}}dX_{J}\,.\end{aligned}}}
従って、前述の方程式 d x = d X + d u {\displaystyle d\mathbf {x} =d\mathbf {X} +d\mathbf {u} } d x = d X + d u = d X + ∇ X u ⋅ d X = ( I + ∇ X u ) d X = F d X {\displaystyle {\begin{aligned}d\mathbf {x} &=d\mathbf {X} +d\mathbf {u} \\&=d\mathbf {X} +\nabla _{\mathbf {X} }\mathbf {u} \cdot d\mathbf {X} \\&=\left(\mathbf {I} +\nabla _{\mathbf {X} }\mathbf {u} \right)d\mathbf {X} \\&=\mathbf {F} d\mathbf {X} \end{aligned}}}
物体の時間依存変形を含む計算では,変形勾配の時間微分を計算する必要がある場合が多い. このような微分を幾何学的に矛盾なく定義するには微分幾何学 に踏み込む必要があるが,この記事ではそのような問題を避ける[4]
F {\displaystyle \mathbf {F} } F ˙ = ∂ F ∂ t = ∂ ∂ t [ ∂ x ( X , t ) ∂ X ] = ∂ ∂ X [ ∂ x ( X , t ) ∂ t ] = ∂ ∂ X [ V ( X , t ) ] {\displaystyle {\dot {\mathbf {F} }}={\frac {\partial \mathbf {F} }{\partial t}}={\frac {\partial }{\partial t}}\left[{\frac {\partial \mathbf {x} (\mathbf {X} ,t)}{\partial \mathbf {X} }}\right]={\frac {\partial }{\partial \mathbf {X} }}\left[{\frac {\partial \mathbf {x} (\mathbf {X} ,t)}{\partial t}}\right]={\frac {\partial }{\partial \mathbf {X} }}\left[\mathbf {V} (\mathbf {X} ,t)\right]}
ここで、 m a t h b f V {\displaystyle mathbf{V}} 物質速度勾配 を表している。微分の連鎖律を適用して空間勾配に変換するのが一般的である、即ち、 F ˙ = ∂ ∂ X [ V ( X , t ) ] = ∂ ∂ X [ v ( x ( X , t ) , t ) ] = ∂ ∂ x [ v ( x , t ) ] | x = x ( X , t ) ⋅ ∂ x ( X , t ) ∂ X = l ⋅ F {\displaystyle {\dot {\mathbf {F} }}={\frac {\partial }{\partial \mathbf {X} }}\left[\mathbf {V} (\mathbf {X} ,t)\right]={\frac {\partial }{\partial \mathbf {X} }}\left[\mathbf {v} (\mathbf {x} (\mathbf {X} ,t),t)\right]=\left.{\frac {\partial }{\partial \mathbf {x} }}\left[\mathbf {v} (\mathbf {x} ,t)\right]\right|_{\mathbf {x} =\mathbf {x} (\mathbf {X} ,t)}\cdot {\frac {\partial \mathbf {x} (\mathbf {X} ,t)}{\partial \mathbf {X} }}={\boldsymbol {l}}\cdot \mathbf {F} }
ここで、 l {\displaystyle {\boldsymbol {l}}} 空間速度勾配('spatial velocity gradient) であり、 v ( x , t ) = V ( X , t ) {\displaystyle \mathbf {v} (\mathbf {x} ,t)=\mathbf {V} (\mathbf {X} ,t)} x = x ( X , t ) {\displaystyle \mathbf {x} =\mathbf {x} (\mathbf {X} ,t)} F = e l t {\displaystyle \mathbf {F} =e^{{\boldsymbol {l}}\,t}} F = 1 {\displaystyle \mathbf {F} =\mathbf {1} } t = 0 {\displaystyle t=0}
連続体力学でよく使われる関連量として、変形率テンソル とスピンテンソル があり、それぞれ次のように定義される: d = 1 2 ( l + l T ) , w = 1 2 ( l − l T ) . {\displaystyle {\boldsymbol {d}}={\tfrac {1}{2}}\left({\boldsymbol {l}}+{\boldsymbol {l}}^{T}\right)\,,~~{\boldsymbol {w}}={\tfrac {1}{2}}\left({\boldsymbol {l}}-{\boldsymbol {l}}^{T}\right)\,.} 渦度 を示す。
有限ひずみを含む解析では、変形勾配の逆数の材料時間微分(基準形状を固定したまま)が必要になることがよくある。 この微分は ∂ ∂ t ( F − 1 ) = − F − 1 ⋅ F ˙ ⋅ F − 1 . {\displaystyle {\frac {\partial }{\partial t}}\left(\mathbf {F} ^{-1}\right)=-\mathbf {F} ^{-1}\cdot {\dot {\mathbf {F} }}\cdot \mathbf {F} ^{-1}\,.}
F − 1 ⋅ d x = d X {\displaystyle \mathbf {F} ^{-1}\cdot d\mathbf {x} =d\mathbf {X} } X ˙ = 0 {\displaystyle {\dot {\mathbf {X} }}=0}
変形された構成における面積に対して定義される量を、基準構成における面積に対する量に変換するため、あるいはその逆の変換も同様に行うため、 d a n = J d A F − T ⋅ N {\displaystyle da~\mathbf {n} =J~dA~\mathbf {F} ^{-T}\cdot \mathbf {N} } d a {\displaystyle da} d A {\displaystyle dA} n {\displaystyle \mathbf {n} } N {\displaystyle \mathbf {N} } F {\displaystyle \mathbf {F} } 変形勾配 であり、また J = det F {\displaystyle J=\det \mathbf {F} \,\!}
体積要素の変換に対応する式は次の通りである。 d v = J d V {\displaystyle dv=J~dV}
see also [5]
この式がどのように導き出されるかを見るために、まず、基準コンフィギュレーションと現在のコンフィギュレーションにおける向き付けられた面積要素から始める: d A = d A N ; d a = d a n {\displaystyle d\mathbf {A} =dA~\mathbf {N} ~;~~d\mathbf {a} =da~\mathbf {n} } d V = d A T ⋅ d L ; d v = d a T ⋅ d l {\displaystyle dV=d\mathbf {A} ^{T}\cdot d\mathbf {L} ~;~~dv=d\mathbf {a} ^{T}\cdot d\mathbf {l} } d l = F ⋅ d L {\displaystyle d\mathbf {l} =\mathbf {F} \cdot d\mathbf {L} \,\!}
従って、 d a T ⋅ d l = d v = J d V = J d A T ⋅ d L {\displaystyle d\mathbf {a} ^{T}\cdot d\mathbf {l} =dv=J~dV=J~d\mathbf {A} ^{T}\cdot d\mathbf {L} } d a T ⋅ F ⋅ d L = d v = J d V = J d A T ⋅ d L {\displaystyle d\mathbf {a} ^{T}\cdot \mathbf {F} \cdot d\mathbf {L} =dv=J~dV=J~d\mathbf {A} ^{T}\cdot d\mathbf {L} } d a T ⋅ F = J d A T {\displaystyle d\mathbf {a} ^{T}\cdot \mathbf {F} =J~d\mathbf {A} ^{T}} d a = J F − T ⋅ d A {\displaystyle d\mathbf {a} =J~\mathbf {F} ^{-T}\cdot d\mathbf {A} } d a n = J d A F − T ⋅ N {\displaystyle da~\mathbf {n} =J~dA~\mathbf {F} ^{-T}\cdot \mathbf {N} }
変形勾配テンソルの極分解(Polar decomposition of the deformation gradient tensor)に付いて説明する。
Figure 3. 変形勾配の極性分解(Representation of the polar decomposition of the deformation gradient) 変形勾配 F {\displaystyle \mathbf {F} \,\!} F = R U = V R {\displaystyle \mathbf {F} =\mathbf {R} \mathbf {U} =\mathbf {V} \mathbf {R} } R {\displaystyle \mathbf {R} } R − 1 = R T {\displaystyle \mathbf {R} ^{-1}=\mathbf {R} ^{T}} det R = + 1 {\displaystyle \det \mathbf {R} =+1\,\!}
テンソル U {\displaystyle \mathbf {U} } right stretch tensor である;
そして、テンソル V {\displaystyle \mathbf {V} } left stretch tensor である。ここで、右 と左 という用語は、それぞれ、回転テンソル R {\displaystyle \mathbf {R} \,\!}
U {\displaystyle \mathbf {U} } V {\displaystyle \mathbf {V} }
x ⋅ U ⋅ x > 0 {\displaystyle \mathbf {x} \cdot \mathbf {U} \cdot \mathbf {x} >0} x ⋅ V ⋅ x > 0 {\displaystyle \mathbf {x} \cdot \mathbf {V} \cdot \mathbf {x} >0} x ∈ R 3 {\displaystyle \mathbf {x} \in \mathbb {R} ^{3}} symmetric tensors, 即ち U = U T {\displaystyle \mathbf {U} =\mathbf {U} ^{T}} V = V T {\displaystyle \mathbf {V} =\mathbf {V} ^{T}\,\!} この分解は、未変形の配置における線要素 d X {\displaystyle d\mathbf {X} } d x {\displaystyle d\mathbf {x} } d x = F d X {\displaystyle d\mathbf {x} =\mathbf {F} \,d\mathbf {X} \,\!} U {\displaystyle \mathbf {U} \,\!} d x ′ = U d X {\displaystyle d\mathbf {x} '=\mathbf {U} \,d\mathbf {X} \,\!} R {\displaystyle \mathbf {R} \,\!} d x ′ = R d x {\displaystyle d\mathbf {x} '=\mathbf {R} \,d\mathbf {x} \,\!} R {\displaystyle \mathbf {R} } d x ′ = R d X {\displaystyle d\mathbf {x} '=\mathbf {R} \,d\mathbf {X} \,\!} V {\displaystyle \mathbf {V} \,\!} d x ′ = V d x {\displaystyle d\mathbf {x} '=\mathbf {V} \,d\mathbf {x} }
R {\displaystyle \mathbf {R} } V = R ⋅ U ⋅ R T {\displaystyle \mathbf {V} =\mathbf {R} \cdot \mathbf {U} \cdot \mathbf {R} ^{T}}
その結果、 U {\displaystyle \mathbf {U} } V {\displaystyle \mathbf {V} } N i {\displaystyle \mathbf {N} _{i}} n i {\displaystyle \mathbf {n} _{i}\,\!} n i = R N i . {\displaystyle \mathbf {n} _{i}=\mathbf {R} \mathbf {N} _{i}.}
この極分解は、 F {\displaystyle \mathbf {F} } 特異値分解 の帰結である。
詳細は「Deformation tensor」を参照
機械工学ではいくつかの回転非依存の変形テンソルが使用されている。その中でも固体力学では、 最も一般的なものは右Cauchy-Green変形テンソルと左Cauchy-Green変形テンソルである。
純粋な回転は可変体にひずみを誘起すべきではないため、連続体力学 においては、回転非依存の変形の尺度を使うことがしばしば便利である。回転に続いて逆回転を行うと変化がないため( R R T = R T R = I {\displaystyle \mathbf {R} \mathbf {R} ^{T}=\mathbf {R} ^{T}\mathbf {R} =\mathbf {I} \,\!} F {\displaystyle \mathbf {F} } 転置 を掛けることで回転を除外することができる。
右コーシー・グリーン変形テンソル(The right Cauchy–Green deformation tensor)について説明する。1839年、ジョージ・グリーンは、「右Cauchy–Green変形テンソル」または「グリーンの変形テンソル」として知られる変形テンソルを導入した。これは以下のように定義される:[6] [7]
C = F T F = U 2 or C I J = F k I F k J = ∂ x k ∂ X I ∂ x k ∂ X J . {\displaystyle \mathbf {C} =\mathbf {F} ^{T}\mathbf {F} =\mathbf {U} ^{2}\qquad {\text{or}}\qquad C_{IJ}=F_{kI}~F_{kJ}={\frac {\partial x_{k}}{\partial X_{I}}}{\frac {\partial x_{k}}{\partial X_{J}}}.}
物理的には、Cauchy–Greenテンソルは変形による距離の局所的な変化の2乗を表す。つまり、以下のように表される。
d x 2 = d X ⋅ C ⋅ d X {\displaystyle d\mathbf {x} ^{2}=d\mathbf {X} \cdot \mathbf {C} \cdot d\mathbf {X} }
C {\displaystyle \mathbf {C} } I 1 C := tr ( C ) = C I I = λ 1 2 + λ 2 2 + λ 3 2 I 2 C := 1 2 [ ( tr C ) 2 − tr ( C 2 ) ] = 1 2 [ ( C J J ) 2 − C I K C K I ] = λ 1 2 λ 2 2 + λ 2 2 λ 3 2 + λ 3 2 λ 1 2 I 3 C := det ( C ) = J 2 = λ 1 2 λ 2 2 λ 3 2 . {\displaystyle {\begin{aligned}I_{1}^{C}&:={\text{tr}}(\mathbf {C} )=C_{II}=\lambda _{1}^{2}+\lambda _{2}^{2}+\lambda _{3}^{2}\\I_{2}^{C}&:={\tfrac {1}{2}}\left[({\text{tr}}~\mathbf {C} )^{2}-{\text{tr}}(\mathbf {C} ^{2})\right]={\tfrac {1}{2}}\left[(C_{JJ})^{2}-C_{IK}C_{KI}\right]=\lambda _{1}^{2}\lambda _{2}^{2}+\lambda _{2}^{2}\lambda _{3}^{2}+\lambda _{3}^{2}\lambda _{1}^{2}\\I_{3}^{C}&:=\det(\mathbf {C} )=J^{2}=\lambda _{1}^{2}\lambda _{2}^{2}\lambda _{3}^{2}.\end{aligned}}} J := det F {\displaystyle J:=\det \mathbf {F} } F {\displaystyle \mathbf {F} } λ i {\displaystyle \lambda _{i}}
IUPAC(国際純正・応用化学連合)は、右Cauchy–Green変形テンソルの逆行列(この文書ではCauchyテンソルと呼ばれる)である C − 1 {\displaystyle \mathbf {C} ^{-1}}
f = C − 1 = F − 1 F − T or f I J = ∂ X I ∂ x k ∂ X J ∂ x k {\displaystyle \mathbf {f} =\mathbf {C} ^{-1}=\mathbf {F} ^{-1}\mathbf {F} ^{-T}\qquad {\text{or}}\qquad f_{IJ}={\frac {\partial X_{I}}{\partial x_{k}}}{\frac {\partial X_{J}}{\partial x_{k}}}}
左コーシー・グリーンテンソル(フィンガー変形テンソル:The left Cauchy–Green or Finger deformation tensor)について説明する。右のグリーン・コーシー変形テンソルの式の乗算の順序を逆にすると、左のコーシー・グリーン変形テンソル となり、次のように定義される: B = F F T = V 2 or B i j = ∂ x i ∂ X K ∂ x j ∂ X K {\displaystyle \mathbf {B} =\mathbf {F} \mathbf {F} ^{T}=\mathbf {V} ^{2}\qquad {\text{or}}\qquad B_{ij}={\frac {\partial x_{i}}{\partial X_{K}}}{\frac {\partial x_{j}}{\partial X_{K}}}}
左Cauchy-Green変形テンソルはしばしばFinger deformation tensor と呼ばれ、Josef Finger (1894)にちなんで命名された。[7] [8] [9]
また、 B {\displaystyle \mathbf {B} } I 1 := tr ( B ) = B i i = λ 1 2 + λ 2 2 + λ 3 2 I 2 := 1 2 [ ( tr B ) 2 − tr ( B 2 ) ] = 1 2 ( B i i 2 − B j k B k j ) = λ 1 2 λ 2 2 + λ 2 2 λ 3 2 + λ 3 2 λ 1 2 I 3 := det B = J 2 = λ 1 2 λ 2 2 λ 3 2 {\displaystyle {\begin{aligned}I_{1}&:={\text{tr}}(\mathbf {B} )=B_{ii}=\lambda _{1}^{2}+\lambda _{2}^{2}+\lambda _{3}^{2}\\I_{2}&:={\tfrac {1}{2}}\left[({\text{tr}}~\mathbf {B} )^{2}-{\text{tr}}(\mathbf {B} ^{2})\right]={\tfrac {1}{2}}\left(B_{ii}^{2}-B_{jk}B_{kj}\right)=\lambda _{1}^{2}\lambda _{2}^{2}+\lambda _{2}^{2}\lambda _{3}^{2}+\lambda _{3}^{2}\lambda _{1}^{2}\\I_{3}&:=\det \mathbf {B} =J^{2}=\lambda _{1}^{2}\lambda _{2}^{2}\lambda _{3}^{2}\end{aligned}}} J := det F {\displaystyle J:=\det \mathbf {F} }
圧縮可能な材料については、少し異なる不変量のセットが使用される: ( I ¯ 1 := J − 2 / 3 I 1 ; I ¯ 2 := J − 4 / 3 I 2 ; J ≠ 1 ) . {\displaystyle ({\bar {I}}_{1}:=J^{-2/3}I_{1}~;~~{\bar {I}}_{2}:=J^{-4/3}I_{2}~;~~J\neq 1)~.}
コーシの変形テンソル(The Cauchy deformation tensor)について述べる。 1828年の早期には、[10] オーギュスタン=ルイ・コーシー は、左Cauchy–Green変形テンソルの逆行列 B − 1 {\displaystyle \mathbf {B} ^{-1}\,\!}
このテンソルは、流体力学や流体力学の文献では、ピオラテンソル [7] フィンガーテンソル [7] [11]
c = B − 1 = F − T F − 1 or c i j = ∂ X K ∂ x i ∂ X K ∂ x j {\displaystyle \mathbf {c} =\mathbf {B} ^{-1}=\mathbf {F} ^{-T}\mathbf {F} ^{-1}\qquad {\text{or}}\qquad c_{ij}={\frac {\partial X_{K}}{\partial x_{i}}}{\frac {\partial X_{K}}{\partial x_{j}}}}
もし3つの異なる主伸び率(principal stretches) λ i {\displaystyle \lambda _{i}\,\!} C {\displaystyle \mathbf {C} } B {\displaystyle \mathbf {B} } C = ∑ i = 1 3 λ i 2 N i ⊗ N i and B = ∑ i = 1 3 λ i 2 n i ⊗ n i {\displaystyle \mathbf {C} =\sum _{i=1}^{3}\lambda _{i}^{2}\mathbf {N} _{i}\otimes \mathbf {N} _{i}\qquad {\text{and}}\qquad \mathbf {B} =\sum _{i=1}^{3}\lambda _{i}^{2}\mathbf {n} _{i}\otimes \mathbf {n} _{i}}
さらに、
U = ∑ i = 1 3 λ i N i ⊗ N i ; V = ∑ i = 1 3 λ i n i ⊗ n i {\displaystyle \mathbf {U} =\sum _{i=1}^{3}\lambda _{i}\mathbf {N} _{i}\otimes \mathbf {N} _{i}~;~~\mathbf {V} =\sum _{i=1}^{3}\lambda _{i}\mathbf {n} _{i}\otimes \mathbf {n} _{i}} R = ∑ i = 1 3 n i ⊗ N i ; F = ∑ i = 1 3 λ i n i ⊗ N i {\displaystyle \mathbf {R} =\sum _{i=1}^{3}\mathbf {n} _{i}\otimes \mathbf {N} _{i}~;~~\mathbf {F} =\sum _{i=1}^{3}\lambda _{i}\mathbf {n} _{i}\otimes \mathbf {N} _{i}}
以下のことに注意するべきである。 V = R U R T = ∑ i = 1 3 λ i R ( N i ⊗ N i ) R T = ∑ i = 1 3 λ i ( R N i ) ⊗ ( R N i ) {\displaystyle \mathbf {V} =\mathbf {R} ~\mathbf {U} ~\mathbf {R} ^{T}=\sum _{i=1}^{3}\lambda _{i}~\mathbf {R} ~(\mathbf {N} _{i}\otimes \mathbf {N} _{i})~\mathbf {R} ^{T}=\sum _{i=1}^{3}\lambda _{i}~(\mathbf {R} ~\mathbf {N} _{i})\otimes (\mathbf {R} ~\mathbf {N} _{i})}
したがって、スペクトル分解の一意性からも n i = R N i {\displaystyle \mathbf {n} _{i}=\mathbf {R} ~\mathbf {N} _{i}\,\!} V {\displaystyle \mathbf {V} \,\!} U {\displaystyle \mathbf {U} \,\!}
変形勾配テンソル F {\displaystyle \mathbf {F} } N i {\displaystyle \mathbf {N} _{i}} λ i {\displaystyle \lambda _{i}} F N i = λ i ( R N i ) = λ i n i {\displaystyle \mathbf {F} ~\mathbf {N} _{i}=\lambda _{i}~(\mathbf {R} ~\mathbf {N} _{i})=\lambda _{i}~\mathbf {n} _{i}} F − T N i = 1 λ i n i ; F T n i = λ i N i ; F − 1 n i = 1 λ i N i . {\displaystyle \mathbf {F} ^{-T}~\mathbf {N} _{i}={\cfrac {1}{\lambda _{i}}}~\mathbf {n} _{i}~;~~\mathbf {F} ^{T}~\mathbf {n} _{i}=\lambda _{i}~\mathbf {N} _{i}~;~~\mathbf {F} ^{-1}~\mathbf {n} _{i}={\cfrac {1}{\lambda _{i}}}~\mathbf {N} _{i}~.}
不圧縮材料の一軸伸長 これは試料が1方向に伸長され、伸び率が α = α 1 {\displaystyle \mathbf {\alpha =\alpha _{1}} \,\!} α 1 α 2 α 3 = 1 {\displaystyle \mathbf {\alpha _{1}\alpha _{2}\alpha _{3}=1} } α 2 = α 3 = α − 0.5 {\displaystyle \mathbf {\alpha _{2}=\alpha _{3}=\alpha ^{-0.5}} \,\!} このとき: F = [ α 0 0 0 α − 0.5 0 0 0 α − 0.5 ] {\displaystyle \mathbf {F} ={\begin{bmatrix}\alpha &0&0\\0&\alpha ^{-0.5}&0\\0&0&\alpha ^{-0.5}\end{bmatrix}}} B = C = [ α 2 0 0 0 α − 1 0 0 0 α − 1 ] {\displaystyle \mathbf {B} =\mathbf {C} ={\begin{bmatrix}\alpha ^{2}&0&0\\0&\alpha ^{-1}&0\\0&0&\alpha ^{-1}\end{bmatrix}}}
単純せん断(Simple shear) F = [ 1 γ 0 0 1 0 0 0 1 ] {\displaystyle \mathbf {F} ={\begin{bmatrix}1&\gamma &0\\0&1&0\\0&0&1\end{bmatrix}}} B = [ 1 + γ 2 γ 0 γ 1 0 0 0 1 ] {\displaystyle \mathbf {B} ={\begin{bmatrix}1+\gamma ^{2}&\gamma &0\\\gamma &1&0\\0&0&1\end{bmatrix}}} C = [ 1 γ 0 γ 1 + γ 2 0 0 0 1 ] {\displaystyle \mathbf {C} ={\begin{bmatrix}1&\gamma &0\\\gamma &1+\gamma ^{2}&0\\0&0&1\end{bmatrix}}} 剛体の回転(Rigid body rotation) F = [ cos θ sin θ 0 − sin θ cos θ 0 0 0 1 ] {\displaystyle \mathbf {F} ={\begin{bmatrix}\cos \theta &\sin \theta &0\\-\sin \theta &\cos \theta &0\\0&0&1\end{bmatrix}}} B = C = [ 1 0 0 0 1 0 0 0 1 ] = 1 {\displaystyle \mathbf {B} =\mathbf {C} ={\begin{bmatrix}1&0&0\\0&1&0\\0&0&1\end{bmatrix}}=\mathbf {1} }
「右コーシグリーン変形テンソルに関する、伸びのテンソル微分は、多くの固体、特に超弾性材料における応力-ひずみ関係を導出するために使用される。これらの導関数
∂ λ i ∂ C = 1 2 λ i N i ⊗ N i = 1 2 λ i R T ( n i ⊗ n i ) R ; i = 1 , 2 , 3 {\displaystyle {\cfrac {\partial \lambda _{i}}{\partial \mathbf {C} }}={\cfrac {1}{2\lambda _{i}}}~\mathbf {N} _{i}\otimes \mathbf {N} _{i}={\cfrac {1}{2\lambda _{i}}}~\mathbf {R} ^{T}~(\mathbf {n} _{i}\otimes \mathbf {n} _{i})~\mathbf {R} ~;~~i=1,2,3} C : ( N i ⊗ N i ) = λ i 2 ; ∂ C ∂ C = I ( s ) ; I ( s ) : ( N i ⊗ N i ) = N i ⊗ N i . {\displaystyle \mathbf {C} :(\mathbf {N} _{i}\otimes \mathbf {N} _{i})=\lambda _{i}^{2}~;~~~~{\cfrac {\partial \mathbf {C} }{\partial \mathbf {C} }}={\mathsf {I}}^{(s)}~;~~~~{\mathsf {I}}^{(s)}:(\mathbf {N} _{i}\otimes \mathbf {N} _{i})=\mathbf {N} _{i}\otimes \mathbf {N} _{i}.}
X = X i E i {\displaystyle \mathbf {X} =X^{i}~{\boldsymbol {E}}_{i}} 直交曲線座標 系とし、 x = x i E i {\displaystyle \mathbf {x} =x^{i}~{\boldsymbol {E}}_{i}} X ( s ) {\displaystyle \mathbf {X} (s)} s ∈ [ 0 , 1 ] {\displaystyle s\in [0,1]} x ( X ( s ) ) {\displaystyle \mathbf {x} (\mathbf {X} (s))}
変形されていない曲線の長さは次の式で与えられる。 l X = ∫ 0 1 | d X d s | d s = ∫ 0 1 d X d s ⋅ d X d s d s = ∫ 0 1 d X d s ⋅ I ⋅ d X d s d s {\displaystyle l_{X}=\int _{0}^{1}\left|{\cfrac {d\mathbf {X} }{ds}}\right|~ds=\int _{0}^{1}{\sqrt {{\cfrac {d\mathbf {X} }{ds}}\cdot {\cfrac {d\mathbf {X} }{ds}}}}~ds=\int _{0}^{1}{\sqrt {{\cfrac {d\mathbf {X} }{ds}}\cdot {\boldsymbol {I}}\cdot {\cfrac {d\mathbf {X} }{ds}}}}~ds}
変形後の長さは、 l x = ∫ 0 1 | d x d s | d s = ∫ 0 1 d x d s ⋅ d x d s d s = ∫ 0 1 ( d x d X ⋅ d X d s ) ⋅ ( d x d X ⋅ d X d s ) d s = ∫ 0 1 d X d s ⋅ [ ( d x d X ) T ⋅ d x d X ] ⋅ d X d s d s {\displaystyle {\begin{aligned}l_{x}&=\int _{0}^{1}\left|{\cfrac {d\mathbf {x} }{ds}}\right|~ds=\int _{0}^{1}{\sqrt {{\cfrac {d\mathbf {x} }{ds}}\cdot {\cfrac {d\mathbf {x} }{ds}}}}~ds=\int _{0}^{1}{\sqrt {\left({\cfrac {d\mathbf {x} }{d\mathbf {X} }}\cdot {\cfrac {d\mathbf {X} }{ds}}\right)\cdot \left({\cfrac {d\mathbf {x} }{d\mathbf {X} }}\cdot {\cfrac {d\mathbf {X} }{ds}}\right)}}~ds\\&=\int _{0}^{1}{\sqrt {{\cfrac {d\mathbf {X} }{ds}}\cdot \left[\left({\cfrac {d\mathbf {x} }{d\mathbf {X} }}\right)^{T}\cdot {\cfrac {d\mathbf {x} }{d\mathbf {X} }}\right]\cdot {\cfrac {d\mathbf {X} }{ds}}}}~ds\end{aligned}}}
右の Cauchy-Green 変形テンソルは次のように定義されることに注意せよ。
C := F T ⋅ F = ( d x d X ) T ⋅ d x d X {\displaystyle {\boldsymbol {C}}:={\boldsymbol {F}}^{T}\cdot {\boldsymbol {F}}=\left({\cfrac {d\mathbf {x} }{d\mathbf {X} }}\right)^{T}\cdot {\cfrac {d\mathbf {x} }{d\mathbf {X} }}}
したがって、 l x = ∫ 0 1 d X d s ⋅ C ⋅ d X d s d s {\displaystyle l_{x}=\int _{0}^{1}{\sqrt {{\cfrac {d\mathbf {X} }{ds}}\cdot {\boldsymbol {C}}\cdot {\cfrac {d\mathbf {X} }{ds}}}}~ds} C {\displaystyle {\boldsymbol {C}}}
「ひずみ」の概念は、特定の変位が剛体の変位と局所的にどの程度異なるかを評価するために使用される。 [3] [12] [13]
大きな変形に対するそのようなひずみの 1 つは、「ラグランジュ有限ひずみテンソル」です。これは、「グリーン ラグランジュひずみテンソル」または「グリーン – セントヴェナントひずみテンソル」とも呼ばれ、次のように定義される。 E = 1 2 ( C − I ) or E K L = 1 2 ( ∂ x j ∂ X K ∂ x j ∂ X L − δ K L ) {\displaystyle \mathbf {E} ={\frac {1}{2}}(\mathbf {C} -\mathbf {I} )\qquad {\text{or}}\qquad E_{KL}={\frac {1}{2}}\left({\frac {\partial x_{j}}{\partial X_{K}}}{\frac {\partial x_{j}}{\partial X_{L}}}-\delta _{KL}\right)}
または変位勾配テンソルの関数として、
E = 1 2 [ ( ∇ X u ) T + ∇ X u + ( ∇ X u ) T ⋅ ∇ X u ] {\displaystyle \mathbf {E} ={\frac {1}{2}}\left[(\nabla _{\mathbf {X} }\mathbf {u} )^{T}+\nabla _{\mathbf {X} }\mathbf {u} +(\nabla _{\mathbf {X} }\mathbf {u} )^{T}\cdot \nabla _{\mathbf {X} }\mathbf {u} \right]} E K L = 1 2 ( ∂ u K ∂ X L + ∂ u L ∂ X K + ∂ u M ∂ X K ∂ u M ∂ X L ) {\displaystyle E_{KL}={\frac {1}{2}}\left({\frac {\partial u_{K}}{\partial X_{L}}}+{\frac {\partial u_{L}}{\partial X_{K}}}+{\frac {\partial u_{M}}{\partial X_{K}}}{\frac {\partial u_{M}}{\partial X_{L}}}\right)}
グリーン ラグランジアンひずみテンソルは、 C {\displaystyle \mathbf {C} } I {\displaystyle \mathbf {I} \,\!}
変形した構成、つまりオイラー記述を参照する「オイラー・アルマンシ有限ひずみテンソル」は、次のように定義されまる。
e = 1 2 ( I − c ) = 1 2 ( I − B − 1 ) or e r s = 1 2 ( δ r s − ∂ X M ∂ x r ∂ X M ∂ x s ) {\displaystyle \mathbf {e} ={\frac {1}{2}}(\mathbf {I} -\mathbf {c} )={\frac {1}{2}}(\mathbf {I} -\mathbf {B} ^{-1})\qquad {\text{or}}\qquad e_{rs}={\frac {1}{2}}\left(\delta _{rs}-{\frac {\partial X_{M}}{\partial x_{r}}}{\frac {\partial X_{M}}{\partial x_{s}}}\right)}
または、我々が持っている変位勾配の関数として、 e i j = 1 2 ( ∂ u i ∂ x j + ∂ u j ∂ x i − ∂ u k ∂ x i ∂ u k ∂ x j ) {\displaystyle e_{ij}={\frac {1}{2}}\left({\frac {\partial u_{i}}{\partial x_{j}}}+{\frac {\partial u_{j}}{\partial x_{i}}}-{\frac {\partial u_{k}}{\partial x_{i}}}{\frac {\partial u_{k}}{\partial x_{j}}}\right)}
■ラグランジュおよびオイラーの有限ひずみテンソルの導出 d X {\displaystyle d\mathbf {X} \,\!} d x {\displaystyle d\mathbf {x} \,\!} d x 2 − d X 2 = d x ⋅ d x − d X ⋅ d X or ( d x ) 2 − ( d X ) 2 = d x j d x j − d X M d X M {\displaystyle d\mathbf {x} ^{2}-d\mathbf {X} ^{2}=d\mathbf {x} \cdot d\mathbf {x} -d\mathbf {X} \cdot d\mathbf {X} \qquad {\text{or}}\qquad (dx)^{2}-(dX)^{2}=dx_{j}dx_{j}-dX_{M}\,dX_{M}}
ラグランジュ記述では、材料座標を基準枠として使用し、微分線間の線形変換は次のようになる。 d x = ∂ x ∂ X d X = F d X or d x j = ∂ x j ∂ X M d X M {\displaystyle d\mathbf {x} ={\frac {\partial \mathbf {x} }{\partial \mathbf {X} }}\,d\mathbf {X} =\mathbf {F} \,d\mathbf {X} \qquad {\text{or}}\qquad dx_{j}={\frac {\partial x_{j}}{\partial X_{M}}}\,dX_{M}}
それから、 d x 2 = d x ⋅ d x = F ⋅ d X ⋅ F ⋅ d X = d X ⋅ F T F ⋅ d X = d X ⋅ C ⋅ d X or ( d x ) 2 = d x j d x j = ∂ x j ∂ X K ∂ x j ∂ X L d X K d X L = C K L d X K d X L {\displaystyle {\begin{aligned}d\mathbf {x} ^{2}&=d\mathbf {x} \cdot d\mathbf {x} \\&=\mathbf {F} \cdot d\mathbf {X} \cdot \mathbf {F} \cdot d\mathbf {X} \\&=d\mathbf {X} \cdot \mathbf {F} ^{T}\mathbf {F} \cdot d\mathbf {X} \\&=d\mathbf {X} \cdot \mathbf {C} \cdot d\mathbf {X} \end{aligned}}\qquad {\text{or}}\qquad {\begin{aligned}(dx)^{2}&=dx_{j}\,dx_{j}\\&={\frac {\partial x_{j}}{\partial X_{K}}}{\frac {\partial x_{j}}{\partial X_{L}}}\,dX_{K}\,dX_{L}\\&=C_{KL}\,dX_{K}\,dX_{L}\\\end{aligned}}}
ここで、 C K L {\displaystyle C_{KL}} C = F T F {\displaystyle \mathbf {C} =\mathbf {F} ^{T}\mathbf {F} \,\!} d x 2 − d X 2 = d X ⋅ C ⋅ d X − d X ⋅ d X = d X ⋅ ( C − I ) ⋅ d X = d X ⋅ 2 E ⋅ d X {\displaystyle {\begin{aligned}d\mathbf {x} ^{2}-d\mathbf {X} ^{2}&=d\mathbf {X} \cdot \mathbf {C} \cdot d\mathbf {X} -d\mathbf {X} \cdot d\mathbf {X} \\&=d\mathbf {X} \cdot (\mathbf {C} -\mathbf {I} )\cdot d\mathbf {X} \\&=d\mathbf {X} \cdot 2\mathbf {E} \cdot d\mathbf {X} \\\end{aligned}}} ( d x ) 2 − ( d X ) 2 = ∂ x j ∂ X K ∂ x j ∂ X L d X K d X L − d X M d X M = ( ∂ x j ∂ X K ∂ x j ∂ X L − δ K L ) d X K d X L = 2 E K L d X K d X L {\displaystyle {\begin{aligned}(dx)^{2}-(dX)^{2}&={\frac {\partial x_{j}}{\partial X_{K}}}{\frac {\partial x_{j}}{\partial X_{L}}}\,dX_{K}\,dX_{L}-dX_{M}\,dX_{M}\\&=\left({\frac {\partial x_{j}}{\partial X_{K}}}{\frac {\partial x_{j}}{\partial X_{L}}}-\delta _{KL}\right)\,dX_{K}\,dX_{L}\\&=2E_{KL}\,dX_{K}\,dX_{L}\end{aligned}}}
ここで、 E K L {\displaystyle E_{KL}\,\!} E = 1 2 ( C − I ) or E K L = 1 2 ( ∂ x j ∂ X K ∂ x j ∂ X L − δ K L ) {\displaystyle \mathbf {E} ={\frac {1}{2}}(\mathbf {C} -\mathbf {I} )\qquad {\text{or}}\qquad E_{KL}={\frac {1}{2}}\left({\frac {\partial x_{j}}{\partial X_{K}}}{\frac {\partial x_{j}}{\partial X_{L}}}-\delta _{KL}\right)}
オイラー記述では、空間座標を基準枠として使用し、微分線間の線形変換は次のようになる。
d X = ∂ X ∂ x d x = F − 1 d x = H d x or d X M = ∂ X M ∂ x n d x n {\displaystyle d\mathbf {X} ={\frac {\partial \mathbf {X} }{\partial \mathbf {x} }}d\mathbf {x} =\mathbf {F} ^{-1}\,d\mathbf {x} =\mathbf {H} \,d\mathbf {x} \qquad {\text{or}}\qquad dX_{M}={\frac {\partial X_{M}}{\partial x_{n}}}\,dx_{n}} ∂ X M ∂ x n {\displaystyle {\frac {\partial X_{M}}{\partial x_{n}}}} H {\displaystyle \mathbf {H} \,\!}
d X 2 = d X ⋅ d X = F − 1 ⋅ d x ⋅ F − 1 ⋅ d x = d x ⋅ F − T F − 1 ⋅ d x = d x ⋅ c ⋅ d x or ( d X ) 2 = d X M d X M = ∂ X M ∂ x r ∂ X M ∂ x s d x r d x s = c r s d x r d x s {\displaystyle {\begin{aligned}d\mathbf {X} ^{2}&=d\mathbf {X} \cdot d\mathbf {X} \\&=\mathbf {F} ^{-1}\cdot d\mathbf {x} \cdot \mathbf {F} ^{-1}\cdot d\mathbf {x} \\&=d\mathbf {x} \cdot \mathbf {F} ^{-T}\mathbf {F} ^{-1}\cdot d\mathbf {x} \\&=d\mathbf {x} \cdot \mathbf {c} \cdot d\mathbf {x} \end{aligned}}\qquad {\text{or}}\qquad {\begin{aligned}(dX)^{2}&=dX_{M}\,dX_{M}\\&={\frac {\partial X_{M}}{\partial x_{r}}}{\frac {\partial X_{M}}{\partial x_{s}}}\,dx_{r}\,dx_{s}\\&=c_{rs}\,dx_{r}\,dx_{s}\\\end{aligned}}}
ここで、2次テンソルは c r s {\displaystyle c_{rs}} c = F − T F − 1 {\displaystyle \mathbf {c} =\mathbf {F} ^{-T}\mathbf {F} ^{-1}\,\!}
d x 2 − d X 2 = d x ⋅ d x − d x ⋅ c ⋅ d x = d x ⋅ ( I − c ) ⋅ d x = d x ⋅ 2 e ⋅ d x {\displaystyle {\begin{aligned}d\mathbf {x} ^{2}-d\mathbf {X} ^{2}&=d\mathbf {x} \cdot d\mathbf {x} -d\mathbf {x} \cdot \mathbf {c} \cdot d\mathbf {x} \\&=d\mathbf {x} \cdot (\mathbf {I} -\mathbf {c} )\cdot d\mathbf {x} \\&=d\mathbf {x} \cdot 2\mathbf {e} \cdot d\mathbf {x} \\\end{aligned}}} ( d x ) 2 − ( d X ) 2 = d x j d x j − ∂ X M ∂ x r ∂ X M ∂ x s d x r d x s = ( δ r s − ∂ X M ∂ x r ∂ X M ∂ x s ) d x r d x s = 2 e r s d x r d x s {\displaystyle {\begin{aligned}(dx)^{2}-(dX)^{2}&=dx_{j}\,dx_{j}-{\frac {\partial X_{M}}{\partial x_{r}}}{\frac {\partial X_{M}}{\partial x_{s}}}\,dx_{r}\,dx_{s}\\&=\left(\delta _{rs}-{\frac {\partial X_{M}}{\partial x_{r}}}{\frac {\partial X_{M}}{\partial x_{s}}}\right)\,dx_{r}\,dx_{s}\\&=2e_{rs}\,dx_{r}\,dx_{s}\end{aligned}}}
ここで、 e r s {\displaystyle e_{rs}\,\!} e = 1 2 ( I − c ) or e r s = 1 2 ( δ r s − ∂ X M ∂ x r ∂ X M ∂ x s ) {\displaystyle \mathbf {e} ={\frac {1}{2}}(\mathbf {I} -\mathbf {c} )\qquad {\text{or}}\qquad e_{rs}={\frac {1}{2}}\left(\delta _{rs}-{\frac {\partial X_{M}}{\partial x_{r}}}{\frac {\partial X_{M}}{\partial x_{s}}}\right)}
LagrangianおよびEulerian有限ひずみテンソルは、変位勾配テンソル を用いて便利に表現することができる。Lagrangianひずみテンソルの場合、まず変位ベクトル u ( X , t ) {\displaystyle \mathbf {u} (\mathbf {X} ,t)} X M {\displaystyle X_{M}} 材料変位勾配テンソル ∇ X u {\displaystyle \nabla _{\mathbf {X} }\mathbf {u} }
u ( X , t ) = x ( X , t ) − X ∇ X u = F − I F = ∇ X u + I or u i = x i − δ i J X J δ i J U J = x i − δ i J X J x i = δ i J ( U J + X J ) ∂ x i ∂ X K = δ i J ( ∂ U J ∂ X K + δ J K ) {\displaystyle {\begin{aligned}\mathbf {u} (\mathbf {X} ,t)&=\mathbf {x} (\mathbf {X} ,t)-\mathbf {X} \\\nabla _{\mathbf {X} }\mathbf {u} &=\mathbf {F} -\mathbf {I} \\\mathbf {F} &=\nabla _{\mathbf {X} }\mathbf {u} +\mathbf {I} \\\end{aligned}}\qquad {\text{or}}\qquad {\begin{aligned}u_{i}&=x_{i}-\delta _{iJ}X_{J}\\\delta _{iJ}U_{J}&=x_{i}-\delta _{iJ}X_{J}\\x_{i}&=\delta _{iJ}\left(U_{J}+X_{J}\right)\\{\frac {\partial x_{i}}{\partial X_{K}}}&=\delta _{iJ}\left({\frac {\partial U_{J}}{\partial X_{K}}}+\delta _{JK}\right)\\\end{aligned}}}
この方程式をラグランジュ有限ひずみテンソルの式に置き換えると、 E = 1 2 ( F T F − I ) = 1 2 [ { ( ∇ X u ) T + I } ( ∇ X u + I ) − I ] = 1 2 [ ( ∇ X u ) T + ∇ X u + ( ∇ X u ) T ⋅ ∇ X u ] {\displaystyle {\begin{aligned}\mathbf {E} &={\frac {1}{2}}\left(\mathbf {F} ^{T}\mathbf {F} -\mathbf {I} \right)\\&={\frac {1}{2}}\left[\left\{(\nabla _{\mathbf {X} }\mathbf {u} )^{T}+\mathbf {I} \right\}\left(\nabla _{\mathbf {X} }\mathbf {u} +\mathbf {I} \right)-\mathbf {I} \right]\\&={\frac {1}{2}}\left[(\nabla _{\mathbf {X} }\mathbf {u} )^{T}+\nabla _{\mathbf {X} }\mathbf {u} +(\nabla _{\mathbf {X} }\mathbf {u} )^{T}\cdot \nabla _{\mathbf {X} }\mathbf {u} \right]\\\end{aligned}}} E K L = 1 2 ( ∂ x j ∂ X K ∂ x j ∂ X L − δ K L ) = 1 2 [ δ j M ( ∂ U M ∂ X K + δ M K ) δ j N ( ∂ U N ∂ X L + δ N L ) − δ K L ] = 1 2 [ δ M N ( ∂ U M ∂ X K + δ M K ) ( ∂ U N ∂ X L + δ N L ) − δ K L ] = 1 2 [ ( ∂ U M ∂ X K + δ M K ) ( ∂ U M ∂ X L + δ M L ) − δ K L ] = 1 2 ( ∂ U K ∂ X L + ∂ U L ∂ X K + ∂ U M ∂ X K ∂ U M ∂ X L ) {\displaystyle {\begin{aligned}E_{KL}&={\frac {1}{2}}\left({\frac {\partial x_{j}}{\partial X_{K}}}{\frac {\partial x_{j}}{\partial X_{L}}}-\delta _{KL}\right)\\&={\frac {1}{2}}\left[\delta _{jM}\left({\frac {\partial U_{M}}{\partial X_{K}}}+\delta _{MK}\right)\delta _{jN}\left({\frac {\partial U_{N}}{\partial X_{L}}}+\delta _{NL}\right)-\delta _{KL}\right]\\&={\frac {1}{2}}\left[\delta _{MN}\left({\frac {\partial U_{M}}{\partial X_{K}}}+\delta _{MK}\right)\left({\frac {\partial U_{N}}{\partial X_{L}}}+\delta _{NL}\right)-\delta _{KL}\right]\\&={\frac {1}{2}}\left[\left({\frac {\partial U_{M}}{\partial X_{K}}}+\delta _{MK}\right)\left({\frac {\partial U_{M}}{\partial X_{L}}}+\delta _{ML}\right)-\delta _{KL}\right]\\&={\frac {1}{2}}\left({\frac {\partial U_{K}}{\partial X_{L}}}+{\frac {\partial U_{L}}{\partial X_{K}}}+{\frac {\partial U_{M}}{\partial X_{K}}}{\frac {\partial U_{M}}{\partial X_{L}}}\right)\end{aligned}}}
同様に、オイラー アルマンシ有限ひずみテンソルは次のように表すことができる。
e i j = 1 2 ( ∂ u i ∂ x j + ∂ u j ∂ x i − ∂ u k ∂ x i ∂ u k ∂ x j ) {\displaystyle e_{ij}={\frac {1}{2}}\left({\frac {\partial u_{i}}{\partial x_{j}}}+{\frac {\partial u_{j}}{\partial x_{i}}}-{\frac {\partial u_{k}}{\partial x_{i}}}{\frac {\partial u_{k}}{\partial x_{j}}}\right)}
インド工科大学カラグプル校のB. R. Sethは、グリーンおよびアルマンジひずみテンソルがより一般的なひずみ尺度の特別な場合であることを最初に示した。[14] [15] [16] [17]
E ( m ) = 1 2 m ( U 2 m − I ) = 1 2 m [ C m − I ] {\displaystyle \mathbf {E} _{(m)}={\frac {1}{2m}}(\mathbf {U} ^{2m}-\mathbf {I} )={\frac {1}{2m}}\left[\mathbf {C} ^{m}-\mathbf {I} \right]}
異なる m {\displaystyle m}
グリーン-ラグランジュひずみテンソル E ( 1 ) = 1 2 ( U 2 − I ) = 1 2 ( C − I ) {\displaystyle \mathbf {E} _{(1)}={\frac {1}{2}}(\mathbf {U} ^{2}-\mathbf {I} )={\frac {1}{2}}(\mathbf {C} -\mathbf {I} )} E ( 1 / 2 ) = ( U − I ) = C 1 / 2 − I {\displaystyle \mathbf {E} _{(1/2)}=(\mathbf {U} -\mathbf {I} )=\mathbf {C} ^{1/2}-\mathbf {I} } E ( 0 ) = ln U = 1 2 , ln C {\displaystyle \mathbf {E} _{(0)}=\ln \mathbf {U} ={\frac {1}{2}},\ln \mathbf {C} } E ( − 1 ) = 1 2 [ I − U − 2 ] {\displaystyle \mathbf {E} _{(-1)}={\frac {1}{2}}\left[\mathbf {I} -\mathbf {U} ^{-2}\right]} E ( m ) = ε + 1 2 ( ∇ u ) T ⋅ ∇ u − ( 1 − m ) ε T ⋅ ε {\displaystyle \mathbf {E} _{(m)}={\boldsymbol {\varepsilon }}+{\tfrac {1}{2}}(\nabla \mathbf {u} )^{T}\cdot \nabla \mathbf {u} -(1-m){\boldsymbol {\varepsilon }}^{T}\cdot {\boldsymbol {\varepsilon }}} ε {\displaystyle {\boldsymbol {\varepsilon }}}
テンソル E {\displaystyle \mathbf {E} } [18]
E {\displaystyle \mathbf {E} } E {\displaystyle \mathbf {E} } ∇ u {\displaystyle \nabla \mathbf {u} } | ∇ u | → 0 {\displaystyle |\nabla \mathbf {u} |\to 0} E {\displaystyle \mathbf {E} } ε {\displaystyle {\boldsymbol {\varepsilon }}} 例はテンソルのセットである。
E ( n ) = ( U n − U − n ) / 2 n {\displaystyle \mathbf {E} ^{(n)}=\left({\mathbf {U} }^{n}-{\mathbf {U} }^{-n}\right)/2n} m = 0 {\displaystyle m=0} n {\displaystyle n} [19]
伸長率 は、微小な線要素の伸長または法線ひずみの尺度であり、未変形構成または変形構成のいずれかで定義することができる。
未変形構成において、材料点 P , ! {\displaystyle P,!} N {\displaystyle \mathbf {N} } d X = d X N {\displaystyle d\mathbf {X} =dX\mathbf {N} } Λ ( N ) = d x d X {\displaystyle \Lambda _{(\mathbf {N} )}={\frac {dx}{dX}}} d x {\displaystyle dx} d X , ! {\displaystyle d\mathbf {X} ,!}
同様に、変形構成において、材料点 p , ! {\displaystyle p,!} n {\displaystyle \mathbf {n} } d x = d x n {\displaystyle d\mathbf {x} =dx\mathbf {n} } 1 Λ ( n ) = d X d x . {\displaystyle {\frac {1}{\Lambda _{(\mathbf {n} )}}}={\frac {dX}{dx}}.}
任意の方向 N {\displaystyle \mathbf {N} } e N {\displaystyle e_{\mathbf {N} }} e ( N ) = d x − d X d X = Λ ( N ) − 1. {\displaystyle e_{(\mathbf {N} )}={\frac {dx-dX}{dX}}=\Lambda _{(\mathbf {N} )}-1.}
この方程式から、伸長率が1に等しい場合、すなわち変形がない場合には、法線ひずみがゼロであることがわかる。一部の材料、例えばエラストマーは、破壊するまで3または4の伸長率を持続できる一方、コンクリートや鋼などの伝統的な工学材料は、1.1程度の伸長率で破壊する(参考文献?)。
ラグランジュの有限ひずみテンソルの対角成分 E K L {\displaystyle E_{KL}}
E 11 = e ( I 1 ) + 1 2 e ( I 1 ) 2 {\displaystyle E_{11}=e_{(\mathbf {I} _{1})}+{\frac {1}{2}}e_{(\mathbf {I} _{1})}^{2}}
ここで、 e ( I 1 ) {\displaystyle e_{(\mathbf {I} _{1})}} I 1 , ! {\displaystyle \mathbf {I} _{1},!}
ラグランジュの有限ひずみテンソルの非対角成分 E K L {\displaystyle E_{KL}}
E 12 = 1 2 2 E 11 + 1 2 E 22 + 1 sin ϕ 12 {\displaystyle E_{12}={\frac {1}{2}}{\sqrt {2E_{11}+1}}{\sqrt {2E_{22}+1}}\sin \phi _{12}}
ここで、 ϕ 12 {\displaystyle \phi _{12}} I 1 {\displaystyle \mathbf {I} _{1}} I 2 , ! {\displaystyle \mathbf {I} _{2},!}
特定の状況下では、つまり小さな変位と小さな変位速度では、ラグランジュの有限ひずみテンソルの成分は微小ひずみテンソルの成分に近似される場合がある。
■ ラグランジュとオイラーの有限ひずみテンソルの物理的解釈の導出 P , ! {\displaystyle P,!} N {\displaystyle \mathbf {N} } d X = d X N {\displaystyle d\mathbf {X} =dX\mathbf {N} }
Λ ( N ) = d x d X {\displaystyle \Lambda _{(\mathbf {N} )}={\frac {dx}{dX}}}
ここで、 d x {\displaystyle dx} d X , ! {\displaystyle d\mathbf {X} ,!}
同様に、変形構成で、物質点 p , ! {\displaystyle p,!} n {\displaystyle \mathbf {n} } d x = d x n {\displaystyle d\mathbf {x} =dx\mathbf {n} }
1 Λ ( n ) = d X d x {\displaystyle {\frac {1}{\Lambda _{(\mathbf {n} )}}}={\frac {dX}{dx}}}
ストレッチ比の二乗は次のように定義される:
Λ ( N ) 2 = ( d x d X ) 2 {\displaystyle \Lambda _{(\mathbf {N} )}^{2}=\left({\frac {dx}{dX}}\right)^{2}}
( d x ) 2 = C K L d X K d X L {\displaystyle (dx)^{2}=C_{KL}dX_{K}dX_{L}}
Λ ( N ) 2 = C K L N K N L {\displaystyle \Lambda _{(\mathbf {N} )}^{2}=C_{KL}N_{K}N_{L}}
ここで、 N K {\displaystyle N_{K}} N L {\displaystyle N_{L}}
任意の方向 N {\displaystyle \mathbf {N} } e N {\displaystyle e_{\mathbf {N} }}
e ( N ) = d x − d X d X = Λ ( N ) − 1 {\displaystyle e_{(\mathbf {N} )}={\frac {dx-dX}{dX}}=\Lambda _{(\mathbf {N} )}-1}
したがって、物質点 P {\displaystyle P} I 1 {\displaystyle \mathbf {I} _{1}}
e ( I 1 ) = d x 1 − d X 1 d X 1 = Λ ( I 1 ) − 1 = C 11 − 1 = δ 11 + 2 E 11 − 1 = 1 + 2 E 11 − 1 {\displaystyle {\begin{aligned}e_{(\mathbf {I} _{1})}={\frac {dx_{1}-dX_{1}}{dX_{1}}}&=\Lambda _{(\mathbf {I} _{1})}-1\\&={\sqrt {C_{11}}}-1={\sqrt {\delta _{11}+2E_{11}}}-1\\&={\sqrt {1+2E_{11}}}-1\end{aligned}}}
E 11 {\displaystyle E_{11}} 2 E 11 = ( d x 1 ) 2 − ( d X 1 ) 2 ( d X 1 ) 2 E 11 = ( d x 1 − d X 1 d X 1 ) + 1 2 ( d x 1 − d X 1 d X 1 ) 2 = e ( I 1 ) + 1 2 e ( I 1 ) 2 {\displaystyle {\begin{aligned}2E_{11}&={\frac {(dx_{1})^{2}-(dX_{1})^{2}}{(dX_{1})^{2}}}\\E_{11}&=\left({\frac {dx_{1}-dX_{1}}{dX_{1}}}\right)+{\frac {1}{2}}\left({\frac {dx_{1}-dX_{1}}{dX_{1}}}\right)^{2}\\&=e_{(\mathbf {I} _{1})}+{\frac {1}{2}}e_{(\mathbf {I} _{1})}^{2}\end{aligned}}}
二つの直交している主方向 I 1 {\displaystyle \mathbf {I} _{1}} I 2 {\displaystyle \mathbf {I} _{2}} d X 1 {\displaystyle d\mathbf {X} _{1}} d X 2 {\displaystyle d\mathbf {X} _{2}} せん断ひずみ もストレッチ比の関数として表現できます。変形した線要素 d x 1 {\displaystyle d\mathbf {x} _{1}} d x 2 {\displaystyle d\mathbf {x} _{2}}
d x 1 ⋅ d x 2 = d x 1 d x 2 cos θ 12 F ⋅ d X 1 ⋅ F ⋅ d X 2 = d X 1 ⋅ F T ⋅ F ⋅ d X 1 ⋅ d X 2 ⋅ F T ⋅ F ⋅ d X 2 cos θ 12 d X 1 ⋅ F T ⋅ F ⋅ d X 2 d X 1 d X 2 = d X 1 ⋅ F T ⋅ F ⋅ d X 1 ⋅ d X 2 ⋅ F T ⋅ F ⋅ d X 2 d X 1 d X 2 cos θ 12 I 1 ⋅ C ⋅ I 2 = Λ I 1 Λ I 2 cos θ 12 {\displaystyle {\begin{aligned}d\mathbf {x} _{1}\cdot d\mathbf {x} _{2}&=dx_{1}dx_{2}\cos \theta _{12}\\\mathbf {F} \cdot d\mathbf {X} _{1}\cdot \mathbf {F} \cdot d\mathbf {X} _{2}&={\sqrt {d\mathbf {X} _{1}\cdot \mathbf {F} ^{T}\cdot \mathbf {F} \cdot d\mathbf {X} _{1}}}\cdot {\sqrt {d\mathbf {X} _{2}\cdot \mathbf {F} ^{T}\cdot \mathbf {F} \cdot d\mathbf {X} _{2}}}\cos \theta _{12}\\{\frac {d\mathbf {X} _{1}\cdot \mathbf {F} ^{T}\cdot \mathbf {F} \cdot d\mathbf {X} _{2}}{dX_{1}dX_{2}}}&={\frac {{\sqrt {d\mathbf {X} _{1}\cdot \mathbf {F} ^{T}\cdot \mathbf {F} \cdot d\mathbf {X} _{1}}}\cdot {\sqrt {d\mathbf {X} _{2}\cdot \mathbf {F} ^{T}\cdot \mathbf {F} \cdot d\mathbf {X} _{2}}}}{dX_{1}dX_{2}}}\cos \theta _{12}\\\mathbf {I} _{1}\cdot \mathbf {C} \cdot \mathbf {I} _{2}&=\Lambda _{\mathbf {I} _{1}}\Lambda _{\mathbf {I} _{2}}\cos \theta _{12}\end{aligned}}}
ここで、 θ 12 {\displaystyle \theta _{12}} d x 1 {\displaystyle d\mathbf {x} _{1}} d x 2 {\displaystyle d\mathbf {x} _{2}} ϕ 12 {\displaystyle \phi _{12}}
ϕ 12 = π 2 − θ 12 {\displaystyle \phi _{12}={\frac {\pi }{2}}-\theta _{12}} cos θ 12 = sin ϕ 12 {\displaystyle \cos \theta _{12}=\sin \phi _{12}} I 1 ⋅ C ⋅ I 2 = Λ I 1 Λ I 2 sin ϕ 12 {\displaystyle \mathbf {I} _{1}\cdot \mathbf {C} \cdot \mathbf {I} _{2}=\Lambda _{\mathbf {I} _{1}}\Lambda _{\mathbf {I} _{2}}\sin \phi _{12}}
or
C 12 = C 11 C 22 sin ϕ 12 2 E 12 + δ 12 = 2 E 11 + 1 2 E 22 + 1 sin ϕ 12 E 12 = 1 2 2 E 11 + 1 2 E 22 + 1 sin ϕ 12 {\displaystyle {\begin{aligned}C_{12}&={\sqrt {C_{11}}}{\sqrt {C_{22}}}\sin \phi _{12}\\2E_{12}+\delta _{12}&={\sqrt {2E_{11}+1}}{\sqrt {2E_{22}+1}}\sin \phi _{12}\\E_{12}&={\frac {1}{2}}{\sqrt {2E_{11}+1}}{\sqrt {2E_{22}+1}}\sin \phi _{12}\end{aligned}}}
変形テンソルの表現は、非線形シェル理論や大きな塑性変形などの連続体力学の多くの問題にとって有用である。空間内の位置ベクトルを座標 ( ξ 1 , ξ 2 , ξ 3 ) {\displaystyle (\xi ^{1},\xi ^{2},\xi ^{3})} x = x ( ξ 1 , ξ 2 , ξ 3 ) {\displaystyle \mathbf {x} =\mathbf {x} (\xi ^{1},\xi ^{2},\xi ^{3})} ξ i {\displaystyle \xi ^{i}} x {\displaystyle \mathbf {x} }
g i = ∂ x ∂ ξ i {\displaystyle \mathbf {g} _{i}={\frac {\partial \mathbf {x} }{\partial \xi ^{i}}}} x {\displaystyle \mathbf {x} } g i ⋅ g j = δ i j {\displaystyle \mathbf {g} _{i}\cdot \mathbf {g} ^{j}=\delta _{i}^{j}}
成分を持つ2階のテンソル場 g {\displaystyle {\boldsymbol {g}}} g i j := ∂ x ∂ ξ i ⋅ ∂ x ∂ ξ j = g i ⋅ g j {\displaystyle g_{ij}:={\frac {\partial \mathbf {x} }{\partial \xi ^{i}}}\cdot {\frac {\partial \mathbf {x} }{\partial \xi ^{j}}}=\mathbf {g} _{i}\cdot \mathbf {g} _{j}} Γ i j k = 1 2 [ ( g i ⋅ g k ) , j + ( g j ⋅ g k ) , i − ( g i ⋅ g j ) , k ] {\displaystyle \Gamma _{ijk}={\tfrac {1}{2}}[(\mathbf {g} _{i}\cdot \mathbf {g} _{k})_{,j}+(\mathbf {g} _{j}\cdot \mathbf {g} _{k})_{,i}-(\mathbf {g} _{i}\cdot \mathbf {g} _{j})_{,k}]}
クリストッフェル記号が右コーシー-グリーン変形テンソルとどのように関連しているかを見るために、変形された格子線に接する基底と、変形前の格子線に接する別の基底を同様に定義してみよう。つまり、 G i := ∂ X ∂ ξ i ; G i ⋅ G j = δ i j ; g i := ∂ x ∂ ξ i ; g i ⋅ g j = δ i j {\displaystyle \mathbf {G} _{i}:={\frac {\partial \mathbf {X} }{\partial \xi ^{i}}}~;~~\mathbf {G} _{i}\cdot \mathbf {G} ^{j}=\delta _{i}^{j}~;~~\mathbf {g} _{i}:={\frac {\partial \mathbf {x} }{\partial \xi ^{i}}}~;~~\mathbf {g} _{i}\cdot \mathbf {g} ^{j}=\delta _{i}^{j}}
曲線座標におけるベクトル場の勾配の定義を用いて、変形勾配は以下のように書くことができる。 F = ∇ X x = ∂ x ∂ ξ i ⊗ G i = g i ⊗ G i {\displaystyle {\boldsymbol {F}}={\boldsymbol {\nabla }}_{\mathbf {X} }\mathbf {x} ={\frac {\partial \mathbf {x} }{\partial \xi ^{i}}}\otimes \mathbf {G} ^{i}=\mathbf {g} _{i}\otimes \mathbf {G} ^{i}}
右の Cauchy-Green 変形テンソルは次の式で与えられます。 C = F T ⋅ F = ( G i ⊗ g i ) ⋅ ( g j ⊗ G j ) = ( g i ⋅ g j ) ( G i ⊗ G j ) {\displaystyle {\boldsymbol {C}}={\boldsymbol {F}}^{T}\cdot {\boldsymbol {F}}=(\mathbf {G} ^{i}\otimes \mathbf {g} _{i})\cdot (\mathbf {g} _{j}\otimes \mathbf {G} ^{j})=(\mathbf {g} _{i}\cdot \mathbf {g} _{j})(\mathbf {G} ^{i}\otimes \mathbf {G} ^{j})} C {\displaystyle {\boldsymbol {C}}} G i {\displaystyle \mathbf {G} ^{i}} C = C i j G i ⊗ G j {\displaystyle {\boldsymbol {C}}=C_{ij}~\mathbf {G} ^{i}\otimes \mathbf {G} ^{j}} C i j = g i ⋅ g j = g i j {\displaystyle C_{ij}=\mathbf {g} _{i}\cdot \mathbf {g} _{j}=g_{ij}}
そして、対応する第 1 種クリストッフェル記号は次の形式で書くことができる。 Γ i j k = 1 2 [ C i k , j + C j k , i − C i j , k ] = 1 2 [ ( G i ⋅ C ⋅ G k ) , j + ( G j ⋅ C ⋅ G k ) , i − ( G i ⋅ C ⋅ G j ) , k ] {\displaystyle \Gamma _{ijk}={\tfrac {1}{2}}[C_{ik,j}+C_{jk,i}-C_{ij,k}]={\tfrac {1}{2}}[(\mathbf {G} _{i}\cdot {\boldsymbol {C}}\cdot \mathbf {G} _{k})_{,j}+(\mathbf {G} _{j}\cdot {\boldsymbol {C}}\cdot \mathbf {G} _{k})_{,i}-(\mathbf {G} _{i}\cdot {\boldsymbol {C}}\cdot \mathbf {G} _{j})_{,k}]}
X = X 1 , X 2 , X 3 {\displaystyle \mathbf {X} ={X^{1},X^{2},X^{3}}} x = x 1 , x 2 , x 3 {\displaystyle \mathbf {x} ={x^{1},x^{2},x^{3}}} G {\displaystyle {\boldsymbol {G}}} g {\displaystyle {\boldsymbol {g}}} G i j = ∂ X α ∂ x i ∂ X β ∂ x j g α β {\displaystyle G_{ij}={\frac {\partial X^{\alpha }}{\partial x^{i}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}~g_{\alpha \beta }} ∂ G i j ∂ x k = ( ∂ 2 X α ∂ x i ∂ x k ∂ X β ∂ x j + ∂ X α ∂ x i ∂ 2 X β ∂ x j ∂ x k ) g α β + ∂ X α ∂ x i ∂ X β ∂ x j ∂ g α β ∂ x k {\displaystyle {\frac {\partial G_{ij}}{\partial x^{k}}}=\left({\frac {\partial ^{2}X^{\alpha }}{\partial x^{i}\partial x^{k}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}+{\frac {\partial X^{\alpha }}{\partial x^{i}}}~{\frac {\partial ^{2}X^{\beta }}{\partial x^{j}\partial x^{k}}}\right)~g_{\alpha \beta }+{\frac {\partial X^{\alpha }}{\partial x^{i}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}~{\frac {\partial g_{\alpha \beta }}{\partial x^{k}}}} ∂ g α β ∂ x k = ∂ X γ ∂ x k ∂ g α β ∂ X γ {\displaystyle {\frac {\partial g_{\alpha \beta }}{\partial x^{k}}}={\frac {\partial X^{\gamma }}{\partial x^{k}}}~{\frac {\partial g_{\alpha \beta }}{\partial X^{\gamma }}}} g α β = g β α {\displaystyle g_{\alpha \beta }=g_{\beta \alpha }}
我々は、以下を得る。 ∂ G i j ∂ x k = ( ∂ 2 X α ∂ x i ∂ x k ∂ X β ∂ x j + ∂ 2 X α ∂ x j ∂ x k ∂ X β ∂ x i ) g α β + ∂ X α ∂ x i ∂ X β ∂ x j ∂ X γ ∂ x k ∂ g α β ∂ X γ ∂ G i k ∂ x j = ( ∂ 2 X α ∂ x i ∂ x j ∂ X β ∂ x k + ∂ 2 X α ∂ x j ∂ x k ∂ X β ∂ x i ) g α β + ∂ X α ∂ x i ∂ X β ∂ x k ∂ X γ ∂ x j ∂ g α β ∂ X γ ∂ G j k ∂ x i = ( ∂ 2 X α ∂ x i ∂ x j ∂ X β ∂ x k + ∂ 2 X α ∂ x i ∂ x k ∂ X β ∂ x j ) g α β + ∂ X α ∂ x j ∂ X β ∂ x k ∂ X γ ∂ x i ∂ g α β ∂ X γ {\displaystyle {\begin{aligned}{\frac {\partial G_{ij}}{\partial x^{k}}}&=\left({\frac {\partial ^{2}X^{\alpha }}{\partial x^{i}\partial x^{k}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}+{\frac {\partial ^{2}X^{\alpha }}{\partial x^{j}\partial x^{k}}}~{\frac {\partial X^{\beta }}{\partial x^{i}}}\right)~g_{\alpha \beta }+{\frac {\partial X^{\alpha }}{\partial x^{i}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}~{\frac {\partial X^{\gamma }}{\partial x^{k}}}~{\frac {\partial g_{\alpha \beta }}{\partial X^{\gamma }}}\\{\frac {\partial G_{ik}}{\partial x^{j}}}&=\left({\frac {\partial ^{2}X^{\alpha }}{\partial x^{i}\partial x^{j}}}~{\frac {\partial X^{\beta }}{\partial x^{k}}}+{\frac {\partial ^{2}X^{\alpha }}{\partial x^{j}\partial x^{k}}}~{\frac {\partial X^{\beta }}{\partial x^{i}}}\right)~g_{\alpha \beta }+{\frac {\partial X^{\alpha }}{\partial x^{i}}}~{\frac {\partial X^{\beta }}{\partial x^{k}}}~{\frac {\partial X^{\gamma }}{\partial x^{j}}}~{\frac {\partial g_{\alpha \beta }}{\partial X^{\gamma }}}\\{\frac {\partial G_{jk}}{\partial x^{i}}}&=\left({\frac {\partial ^{2}X^{\alpha }}{\partial x^{i}\partial x^{j}}}~{\frac {\partial X^{\beta }}{\partial x^{k}}}+{\frac {\partial ^{2}X^{\alpha }}{\partial x^{i}\partial x^{k}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}\right)~g_{\alpha \beta }+{\frac {\partial X^{\alpha }}{\partial x^{j}}}~{\frac {\partial X^{\beta }}{\partial x^{k}}}~{\frac {\partial X^{\gamma }}{\partial x^{i}}}~{\frac {\partial g_{\alpha \beta }}{\partial X^{\gamma }}}\end{aligned}}} ( x ) Γ i j k := 1 2 ( ∂ G i k ∂ x j + ∂ G j k ∂ x i − ∂ G i j ∂ x k ) ( X ) Γ α β γ := 1 2 ( ∂ g α γ ∂ X β + ∂ g β γ ∂ X α − ∂ g α β ∂ X γ ) {\displaystyle {\begin{aligned}_{(x)}\Gamma _{ijk}&:={\frac {1}{2}}\left({\frac {\partial G_{ik}}{\partial x^{j}}}+{\frac {\partial G_{jk}}{\partial x^{i}}}-{\frac {\partial G_{ij}}{\partial x^{k}}}\right)\\_{(X)}\Gamma _{\alpha \beta \gamma }&:={\frac {1}{2}}\left({\frac {\partial g_{\alpha \gamma }}{\partial X^{\beta }}}+{\frac {\partial g_{\beta \gamma }}{\partial X^{\alpha }}}-{\frac {\partial g_{\alpha \beta }}{\partial X^{\gamma }}}\right)\\\end{aligned}}} ( x ) Γ i j k = ∂ X α ∂ x i ∂ X β ∂ x j ∂ X γ ∂ x k ( X ) Γ α β γ + ∂ 2 X α ∂ x i ∂ x j ∂ X β ∂ x k g α β {\displaystyle _{(x)}\Gamma _{ijk}={\frac {\partial X^{\alpha }}{\partial x^{i}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}~{\frac {\partial X^{\gamma }}{\partial x^{k}}}\,_{(X)}\Gamma _{\alpha \beta \gamma }+{\frac {\partial ^{2}X^{\alpha }}{\partial x^{i}\partial x^{j}}}~{\frac {\partial X^{\beta }}{\partial x^{k}}}~g_{\alpha \beta }} [ G i j ] = [ G i j ] − 1 ; [ g α β ] = [ g α β ] − 1 {\displaystyle [G^{ij}]=[G_{ij}]^{-1}~;~~[g^{\alpha \beta }]=[g_{\alpha \beta }]^{-1}} G i j = ∂ x i ∂ X α ∂ x j ∂ X β g α β {\displaystyle G^{ij}={\frac {\partial x^{i}}{\partial X^{\alpha }}}~{\frac {\partial x^{j}}{\partial X^{\beta }}}~g^{\alpha \beta }} ( x ) Γ i j m := G m k ( x ) Γ i j k ; ( X ) Γ α β ν := g ν γ ( X ) Γ α β γ {\displaystyle _{(x)}\Gamma _{ij}^{m}:=G^{mk}\,_{(x)}\Gamma _{ijk}~;~~_{(X)}\Gamma _{\alpha \beta }^{\nu }:=g^{\nu \gamma }\,_{(X)}\Gamma _{\alpha \beta \gamma }} ( x ) Γ i j m = G m k ∂ X α ∂ x i ∂ X β ∂ x j ∂ X γ ∂ x k ( X ) Γ α β γ + G m k ∂ 2 X α ∂ x i ∂ x j ∂ X β ∂ x k g α β = ∂ x m ∂ X ν ∂ x k ∂ X ρ g ν ρ ∂ X α ∂ x i ∂ X β ∂ x j ∂ X γ ∂ x k ( X ) Γ α β γ + ∂ x m ∂ X ν ∂ x k ∂ X ρ g ν ρ ∂ 2 X α ∂ x i ∂ x j ∂ X β ∂ x k g α β = ∂ x m ∂ X ν δ ρ γ g ν ρ ∂ X α ∂ x i ∂ X β ∂ x j ( X ) Γ α β γ + ∂ x m ∂ X ν δ ρ β g ν ρ ∂ 2 X α ∂ x i ∂ x j g α β = ∂ x m ∂ X ν g ν γ ∂ X α ∂ x i ∂ X β ∂ x j ( X ) Γ α β γ + ∂ x m ∂ X ν g ν β ∂ 2 X α ∂ x i ∂ x j g α β = ∂ x m ∂ X ν ∂ X α ∂ x i ∂ X β ∂ x j ( X ) Γ α β ν + ∂ x m ∂ X ν δ α ν ∂ 2 X α ∂ x i ∂ x j {\displaystyle {\begin{aligned}_{(x)}\Gamma _{ij}^{m}&=G^{mk}~{\frac {\partial X^{\alpha }}{\partial x^{i}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}~{\frac {\partial X^{\gamma }}{\partial x^{k}}}\,_{(X)}\Gamma _{\alpha \beta \gamma }+G^{mk}~{\frac {\partial ^{2}X^{\alpha }}{\partial x^{i}\partial x^{j}}}~{\frac {\partial X^{\beta }}{\partial x^{k}}}~g_{\alpha \beta }\\&={\frac {\partial x^{m}}{\partial X^{\nu }}}~{\frac {\partial x^{k}}{\partial X^{\rho }}}~g^{\nu \rho }~{\frac {\partial X^{\alpha }}{\partial x^{i}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}~{\frac {\partial X^{\gamma }}{\partial x^{k}}}\,_{(X)}\Gamma _{\alpha \beta \gamma }+{\frac {\partial x^{m}}{\partial X^{\nu }}}~{\frac {\partial x^{k}}{\partial X^{\rho }}}~g^{\nu \rho }~{\frac {\partial ^{2}X^{\alpha }}{\partial x^{i}\partial x^{j}}}~{\frac {\partial X^{\beta }}{\partial x^{k}}}~g_{\alpha \beta }\\&={\frac {\partial x^{m}}{\partial X^{\nu }}}~\delta _{\rho }^{\gamma }~g^{\nu \rho }~{\frac {\partial X^{\alpha }}{\partial x^{i}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}\,_{(X)}\Gamma _{\alpha \beta \gamma }+{\frac {\partial x^{m}}{\partial X^{\nu }}}~\delta _{\rho }^{\beta }~g^{\nu \rho }~{\frac {\partial ^{2}X^{\alpha }}{\partial x^{i}\partial x^{j}}}~g_{\alpha \beta }\\&={\frac {\partial x^{m}}{\partial X^{\nu }}}~g^{\nu \gamma }~{\frac {\partial X^{\alpha }}{\partial x^{i}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}\,_{(X)}\Gamma _{\alpha \beta \gamma }+{\frac {\partial x^{m}}{\partial X^{\nu }}}~g^{\nu \beta }~{\frac {\partial ^{2}X^{\alpha }}{\partial x^{i}\partial x^{j}}}~g_{\alpha \beta }\\&={\frac {\partial x^{m}}{\partial X^{\nu }}}~{\frac {\partial X^{\alpha }}{\partial x^{i}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}\,_{(X)}\Gamma _{\alpha \beta }^{\nu }+{\frac {\partial x^{m}}{\partial X^{\nu }}}~\delta _{\alpha }^{\nu }~{\frac {\partial ^{2}X^{\alpha }}{\partial x^{i}\partial x^{j}}}\end{aligned}}} ( x ) Γ i j m = ∂ x m ∂ X ν ∂ X α ∂ x i ∂ X β ∂ x j ( X ) Γ α β ν + ∂ x m ∂ X α ∂ 2 X α ∂ x i ∂ x j {\displaystyle _{(x)}\Gamma _{ij}^{m}={\frac {\partial x^{m}}{\partial X^{\nu }}}~{\frac {\partial X^{\alpha }}{\partial x^{i}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}\,_{(X)}\Gamma _{\alpha \beta }^{\nu }+{\frac {\partial x^{m}}{\partial X^{\alpha }}}~{\frac {\partial ^{2}X^{\alpha }}{\partial x^{i}\partial x^{j}}}} ∂ X μ ∂ x m ( x ) Γ i j m = ∂ X μ ∂ x m ∂ x m ∂ X ν ∂ X α ∂ x i ∂ X β ∂ x j ( X ) Γ α β ν + ∂ X μ ∂ x m ∂ x m ∂ X α ∂ 2 X α ∂ x i ∂ x j = δ ν μ ∂ X α ∂ x i ∂ X β ∂ x j ( X ) Γ α β ν + δ α μ ∂ 2 X α ∂ x i ∂ x j = ∂ X α ∂ x i ∂ X β ∂ x j ( X ) Γ α β μ + ∂ 2 X μ ∂ x i ∂ x j {\displaystyle {\begin{aligned}{\frac {\partial X^{\mu }}{\partial x^{m}}}\,_{(x)}\Gamma _{ij}^{m}&={\frac {\partial X^{\mu }}{\partial x^{m}}}~{\frac {\partial x^{m}}{\partial X^{\nu }}}~{\frac {\partial X^{\alpha }}{\partial x^{i}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}\,_{(X)}\Gamma _{\alpha \beta }^{\nu }+{\frac {\partial X^{\mu }}{\partial x^{m}}}~{\frac {\partial x^{m}}{\partial X^{\alpha }}}~{\frac {\partial ^{2}X^{\alpha }}{\partial x^{i}\partial x^{j}}}\\&=\delta _{\nu }^{\mu }~{\frac {\partial X^{\alpha }}{\partial x^{i}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}\,_{(X)}\Gamma _{\alpha \beta }^{\nu }+\delta _{\alpha }^{\mu }~{\frac {\partial ^{2}X^{\alpha }}{\partial x^{i}\partial x^{j}}}\\&={\frac {\partial X^{\alpha }}{\partial x^{i}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}\,_{(X)}\Gamma _{\alpha \beta }^{\mu }+{\frac {\partial ^{2}X^{\mu }}{\partial x^{i}\partial x^{j}}}\end{aligned}}} x {\displaystyle x} ∂ 2 X μ ∂ x i ∂ x j = ∂ X μ ∂ x m ( x ) Γ i j m − ∂ X α ∂ x i ∂ X β ∂ x j ( X ) Γ α β μ ∂ 2 x m ∂ X α ∂ X β = ∂ x m ∂ X μ ( X ) Γ α β μ − ∂ x i ∂ X α ∂ x j ∂ X β ( x ) Γ i j m {\displaystyle {\begin{aligned}{\frac {\partial ^{2}X^{\mu }}{\partial x^{i}\partial x^{j}}}&={\frac {\partial X^{\mu }}{\partial x^{m}}}\,_{(x)}\Gamma _{ij}^{m}-{\frac {\partial X^{\alpha }}{\partial x^{i}}}~{\frac {\partial X^{\beta }}{\partial x^{j}}}\,_{(X)}\Gamma _{\alpha \beta }^{\mu }\\{\frac {\partial ^{2}x^{m}}{\partial X^{\alpha }\partial X^{\beta }}}&={\frac {\partial x^{m}}{\partial X^{\mu }}}\,_{(X)}\Gamma _{\alpha \beta }^{\mu }-{\frac {\partial x^{i}}{\partial X^{\alpha }}}~{\frac {\partial x^{j}}{\partial X^{\beta }}}\,_{(x)}\Gamma _{ij}^{m}\end{aligned}}}
詳細は「Compatibility (mechanics)」を参照
連続体力学における互換性の問題は、物体上の許容される単一値連続場の決定を含む。これらの許容条件は、変形後に物体に物理的な隙間や重なりが残らないようにする。ほとんどの場合、これらの条件は単連結な物体に適用されます。多重連結な物体の内部境界には追加の条件が必要である。
単連結な物体上で互換性のある F {\displaystyle {\boldsymbol {F}}} ∇ × F = 0 {\displaystyle {\boldsymbol {\nabla }}\times {\boldsymbol {F}}={\boldsymbol {0}}}
単連結な物体上で互換性のある C {\displaystyle {\boldsymbol {C}}}
R α β ρ γ := ∂ ∂ X ρ [ ( X ) Γ α β γ ] − ∂ ∂ X β [ ( X ) Γ α ρ γ ] + ( X ) Γ μ ρ γ ( X ) Γ α β μ − ( X ) Γ μ β γ ( X ) Γ α ρ μ = 0 {\displaystyle R_{\alpha \beta \rho }^{\gamma }:={\frac {\partial }{\partial X^{\rho }}}[\,_{(X)}\Gamma _{\alpha \beta }^{\gamma }]-{\frac {\partial }{\partial X^{\beta }}}[\,_{(X)}\Gamma _{\alpha \rho }^{\gamma }]+\,_{(X)}\Gamma _{\mu \rho }^{\gamma }\,_{(X)}\Gamma _{\alpha \beta }^{\mu }-\,_{(X)}\Gamma _{\mu \beta }^{\gamma }\,_{(X)}\Gamma _{\alpha \rho }^{\mu }=0}
これらは、リーマン–クリストッフェル曲率テンソルの混合成分であることが示される。したがって、 C {\displaystyle {\boldsymbol {C}}}
三次元の左カウシー・グリーン変形テンソルについて一般的な十分条件は知られていない。二次元の B {\displaystyle {\boldsymbol {B}}} [20] [21]
^ Insight. “1章 非線形解析における応力と歪”. 2022年9月6日 閲覧。 ^ 中川光雄 (2005年9月). “有限差分法コードFLAC 第6回 ~大変形解析(その1)~”. GEOSCIENCE RESEARCH LABORATORY . 2022年9月6日 閲覧。 ^ a b Lubliner, Jacob (2008). Plasticity Theory (Revised ed.). Dover Publications. ISBN 978-0-486-46290-5. オリジナルの2010-03-31時点におけるアーカイブ。. https://web.archive.org/web/20100331022415/http://www.ce.berkeley.edu/~coby/plas/pdf/book.pdf ^ A. Yavari, J.E. Marsden, and M. Ortiz, On spatial and material covariant balance laws in elasticity, Journal of Mathematical Physics, 47, 2006, 042903; pp. 1–53. ^ Eduardo de Souza Neto; Djordje Peric; Owens, David (2008). Computational methods for plasticity : theory and applications . Chichester, West Sussex, UK: Wiley. p. 65. ISBN 978-0-470-69452-7 ^ The IUPAC recommends that this tensor be called the Cauchy strain tensor. ^ a b c d A. Kaye, R. F. T. Stepto, W. J. Work, J. V. Aleman (Spain), A. Ya. Malkin (1998). “Definition of terms relating to the non-ultimate mechanical properties of polymers”. Pure Appl. Chem. 70 (3): 701–754. doi:10.1351/pac199870030701. http://old.iupac.org/reports/1998/7003kaye/index.html . ^ Eduardo N. Dvorkin, Marcela B. Goldschmit, 2006 Nonlinear Continua, p. 25, Springer ISBN 3-540-24985-0. ^ The IUPAC recommends that this tensor be called the Green strain tensor. ^ Jirásek,Milan; Bažant, Z. P. (2002) Inelastic analysis of structures, Wiley, p. 463 ISBN 0-471-98716-6 ^ J. N. Reddy, David K. Gartling (2000) The finite element method in heat transfer and fluid dynamics, p. 317, CRC Press ISBN 1-4200-8598-0. ^ Belytschko, Ted; Liu, Wing Kam; Moran, Brian (2000). Nonlinear Finite Elements for Continua and Structures (reprint with corrections, 2006 ed.). John Wiley & Sons Ltd.. pp. 92–94. ISBN 978-0-471-98773-4 ^ Zeidi, Mahdi; Kim, Chun IL (2018). “Mechanics of an elastic solid reinforced with bidirectional fiber in finite plane elastostatics: complete analysis”. Continuum Mechanics and Thermodynamics 30 (3): 573-592. doi:10.1007/s00161-018-0623-0. ISSN 1432-0959. ^ Seth, B. R. (1961), “Generalized strain measure with applications to physical problems”, MRC Technical Summary Report #248 (Mathematics Research Center, United States Army, University of Wisconsin): 1–18, オリジナルのAugust 22, 2013時点におけるアーカイブ。, https://web.archive.org/web/20130822233433/http://www.dtic.mil/cgi-bin/GetTRDoc?AD=AD0266913 ^ Seth, B. R. (1962), “Generalized strain measure with applications to physical problems”, IUTAM Symposium on Second Order Effects in Elasticity, Plasticity and Fluid Mechanics, Haifa, 1962. ^ Hill, R. (1968), “On constitutive inequalities for simple materials—I”, Journal of the Mechanics and Physics of Solids 16 (4): 229–242, Bibcode: 1968JMPSo..16..229H, doi:10.1016/0022-5096(68)90031-8 ^ T.C. Doyle and J.L. Eriksen (1956). "Non-linear elasticity." Advances in Applied Mechanics 4, 53–115. ^ Z.P. Bažant and L. Cedolin (1991). Stability of Structures. Elastic, Inelastic, Fracture and Damage Theories. Oxford Univ. Press, New York (2nd ed. Dover Publ., New York 2003; 3rd ed., World Scientific 2010). ^ Z.P. Bažant (1998). "Easy-to-compute tensors with symmetric inverse approximating Hencky finite strain and its rate." Journal of Materials of Technology ASME , 120 (April), 131–136. ^ Blume, J. A. (1989). “Compatibility conditions for a left Cauchy–Green strain field”. Journal of Elasticity 21 (3): 271–308. doi:10.1007/BF00045780. ^ Acharya, A. (1999). “On Compatibility Conditions for the Left Cauchy–Green Deformation Field in Three Dimensions”. Journal of Elasticity 56 (2): 95–105. doi:10.1023/A:1007653400249. http://imechanica.org/files/B-compatibility.pdf .
Dill, Ellis Harold (2006). Continuum Mechanics: Elasticity, Plasticity, Viscoelasticity . Germany: CRC Press. ISBN 0-8493-9779-0. https://books.google.com/books?id=Nn4kztfbR3AC Dimitrienko, Yuriy (2011). Nonlinear Continuum Mechanics and Large Inelastic Deformations . Germany: Springer. ISBN 978-94-007-0033-8. https://books.google.com/books?as_isbn=9789400700338 Hutter, Kolumban; Klaus Jöhnk (2004). Continuum Methods of Physical Modeling . Germany: Springer. ISBN 3-540-20619-1. https://books.google.com/books?id=B-dxx724YD4C Lubarda, Vlado A. (2001). Elastoplasticity Theory . CRC Press. ISBN 0-8493-1138-1. https://books.google.com/books?id=1P0LybL4oAgC Macosko, C. W. (1994). Rheology: principles, measurement and applications . VCH Publishers. ISBN 1-56081-579-5 Mase, George E. (1970). Continuum Mechanics . McGraw-Hill Professional. ISBN 0-07-040663-4. https://books.google.com/books?id=bAdg6yxC0xUC Mase, G. Thomas; George E. Mase (1999). Continuum Mechanics for Engineers (Second ed.). CRC Press. ISBN 0-8493-1855-6. https://books.google.com/books?id=uI1ll0A8B_UC Nemat-Nasser, Sia (2006). Plasticity: A Treatise on Finite Deformation of Heterogeneous Inelastic Materials . Cambridge: Cambridge University Press. ISBN 0-521-83979-3. https://books.google.com/books?id=5nO78Rt0BtMC Rees, David (2006). Basic Engineering Plasticity – An Introduction with Engineering and Manufacturing Applications . Butterworth-Heinemann. ISBN 0-7506-8025-3. https://books.google.com/books?id=4KWbmn_1hcYC
Infinitesimal strain Compatibility (mechanics) Curvilinear coordinates Piola–Kirchhoff stress tensor, the stress tensor for finite deformations. Stress measures Strain partitioning
Prof. Amit Acharya's notes on compatibility on iMechanica 































































![{\displaystyle {\dot {\mathbf {F} }}={\frac {\partial \mathbf {F} }{\partial t}}={\frac {\partial }{\partial t}}\left[{\frac {\partial \mathbf {x} (\mathbf {X} ,t)}{\partial \mathbf {X} }}\right]={\frac {\partial }{\partial \mathbf {X} }}\left[{\frac {\partial \mathbf {x} (\mathbf {X} ,t)}{\partial t}}\right]={\frac {\partial }{\partial \mathbf {X} }}\left[\mathbf {V} (\mathbf {X} ,t)\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f2666606a9db3c727de1e94fa372b590683f72c0)

![{\displaystyle {\dot {\mathbf {F} }}={\frac {\partial }{\partial \mathbf {X} }}\left[\mathbf {V} (\mathbf {X} ,t)\right]={\frac {\partial }{\partial \mathbf {X} }}\left[\mathbf {v} (\mathbf {x} (\mathbf {X} ,t),t)\right]=\left.{\frac {\partial }{\partial \mathbf {x} }}\left[\mathbf {v} (\mathbf {x} ,t)\right]\right|_{\mathbf {x} =\mathbf {x} (\mathbf {X} ,t)}\cdot {\frac {\partial \mathbf {x} (\mathbf {X} ,t)}{\partial \mathbf {X} }}={\boldsymbol {l}}\cdot \mathbf {F} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/abbb3bd21a0c39cedc504214b5bb20503386c081)





















































![{\displaystyle {\begin{aligned}I_{1}^{C}&:={\text{tr}}(\mathbf {C} )=C_{II}=\lambda _{1}^{2}+\lambda _{2}^{2}+\lambda _{3}^{2}\\I_{2}^{C}&:={\tfrac {1}{2}}\left[({\text{tr}}~\mathbf {C} )^{2}-{\text{tr}}(\mathbf {C} ^{2})\right]={\tfrac {1}{2}}\left[(C_{JJ})^{2}-C_{IK}C_{KI}\right]=\lambda _{1}^{2}\lambda _{2}^{2}+\lambda _{2}^{2}\lambda _{3}^{2}+\lambda _{3}^{2}\lambda _{1}^{2}\\I_{3}^{C}&:=\det(\mathbf {C} )=J^{2}=\lambda _{1}^{2}\lambda _{2}^{2}\lambda _{3}^{2}.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6d05cca3762fe510c6252312cb22a66da138cfef)






![{\displaystyle {\begin{aligned}I_{1}&:={\text{tr}}(\mathbf {B} )=B_{ii}=\lambda _{1}^{2}+\lambda _{2}^{2}+\lambda _{3}^{2}\\I_{2}&:={\tfrac {1}{2}}\left[({\text{tr}}~\mathbf {B} )^{2}-{\text{tr}}(\mathbf {B} ^{2})\right]={\tfrac {1}{2}}\left(B_{ii}^{2}-B_{jk}B_{kj}\right)=\lambda _{1}^{2}\lambda _{2}^{2}+\lambda _{2}^{2}\lambda _{3}^{2}+\lambda _{3}^{2}\lambda _{1}^{2}\\I_{3}&:=\det \mathbf {B} =J^{2}=\lambda _{1}^{2}\lambda _{2}^{2}\lambda _{3}^{2}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7e88d7c726ee801990cc0dda3221b4a2edc04aa5)


























![{\displaystyle s\in [0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/aff1a54fbbee4a2677039524a5139e952fa86eb9)


![{\displaystyle {\begin{aligned}l_{x}&=\int _{0}^{1}\left|{\cfrac {d\mathbf {x} }{ds}}\right|~ds=\int _{0}^{1}{\sqrt {{\cfrac {d\mathbf {x} }{ds}}\cdot {\cfrac {d\mathbf {x} }{ds}}}}~ds=\int _{0}^{1}{\sqrt {\left({\cfrac {d\mathbf {x} }{d\mathbf {X} }}\cdot {\cfrac {d\mathbf {X} }{ds}}\right)\cdot \left({\cfrac {d\mathbf {x} }{d\mathbf {X} }}\cdot {\cfrac {d\mathbf {X} }{ds}}\right)}}~ds\\&=\int _{0}^{1}{\sqrt {{\cfrac {d\mathbf {X} }{ds}}\cdot \left[\left({\cfrac {d\mathbf {x} }{d\mathbf {X} }}\right)^{T}\cdot {\cfrac {d\mathbf {x} }{d\mathbf {X} }}\right]\cdot {\cfrac {d\mathbf {X} }{ds}}}}~ds\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dd1b639bab0e25d96cf46894973e1d2693800d94)




![{\displaystyle \mathbf {E} ={\frac {1}{2}}\left[(\nabla _{\mathbf {X} }\mathbf {u} )^{T}+\nabla _{\mathbf {X} }\mathbf {u} +(\nabla _{\mathbf {X} }\mathbf {u} )^{T}\cdot \nabla _{\mathbf {X} }\mathbf {u} \right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/613f67ee25337f305e0fe930e90f5099becdc913)


























![{\displaystyle {\begin{aligned}\mathbf {E} &={\frac {1}{2}}\left(\mathbf {F} ^{T}\mathbf {F} -\mathbf {I} \right)\\&={\frac {1}{2}}\left[\left\{(\nabla _{\mathbf {X} }\mathbf {u} )^{T}+\mathbf {I} \right\}\left(\nabla _{\mathbf {X} }\mathbf {u} +\mathbf {I} \right)-\mathbf {I} \right]\\&={\frac {1}{2}}\left[(\nabla _{\mathbf {X} }\mathbf {u} )^{T}+\nabla _{\mathbf {X} }\mathbf {u} +(\nabla _{\mathbf {X} }\mathbf {u} )^{T}\cdot \nabla _{\mathbf {X} }\mathbf {u} \right]\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a1bc4d02e18262b73b16470e4e4cfb36c933410b)
![{\displaystyle {\begin{aligned}E_{KL}&={\frac {1}{2}}\left({\frac {\partial x_{j}}{\partial X_{K}}}{\frac {\partial x_{j}}{\partial X_{L}}}-\delta _{KL}\right)\\&={\frac {1}{2}}\left[\delta _{jM}\left({\frac {\partial U_{M}}{\partial X_{K}}}+\delta _{MK}\right)\delta _{jN}\left({\frac {\partial U_{N}}{\partial X_{L}}}+\delta _{NL}\right)-\delta _{KL}\right]\\&={\frac {1}{2}}\left[\delta _{MN}\left({\frac {\partial U_{M}}{\partial X_{K}}}+\delta _{MK}\right)\left({\frac {\partial U_{N}}{\partial X_{L}}}+\delta _{NL}\right)-\delta _{KL}\right]\\&={\frac {1}{2}}\left[\left({\frac {\partial U_{M}}{\partial X_{K}}}+\delta _{MK}\right)\left({\frac {\partial U_{M}}{\partial X_{L}}}+\delta _{ML}\right)-\delta _{KL}\right]\\&={\frac {1}{2}}\left({\frac {\partial U_{K}}{\partial X_{L}}}+{\frac {\partial U_{L}}{\partial X_{K}}}+{\frac {\partial U_{M}}{\partial X_{K}}}{\frac {\partial U_{M}}{\partial X_{L}}}\right)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8613306031cc1580236c979b6aec6c795d3e4db9)
![{\displaystyle \mathbf {E} _{(m)}={\frac {1}{2m}}(\mathbf {U} ^{2m}-\mathbf {I} )={\frac {1}{2m}}\left[\mathbf {C} ^{m}-\mathbf {I} \right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/70e3f0b7ddba558d16a401580cf534133ef24d09)




![{\displaystyle \mathbf {E} _{(-1)}={\frac {1}{2}}\left[\mathbf {I} -\mathbf {U} ^{-2}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0446d9edf116c655919b58ac4fc46fab8778af99)






















































![{\displaystyle \Gamma _{ijk}={\tfrac {1}{2}}[(\mathbf {g} _{i}\cdot \mathbf {g} _{k})_{,j}+(\mathbf {g} _{j}\cdot \mathbf {g} _{k})_{,i}-(\mathbf {g} _{i}\cdot \mathbf {g} _{j})_{,k}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6c84f52a8b94bf81096fd54ad218ac8c8a794593)






![{\displaystyle \Gamma _{ijk}={\tfrac {1}{2}}[C_{ik,j}+C_{jk,i}-C_{ij,k}]={\tfrac {1}{2}}[(\mathbf {G} _{i}\cdot {\boldsymbol {C}}\cdot \mathbf {G} _{k})_{,j}+(\mathbf {G} _{j}\cdot {\boldsymbol {C}}\cdot \mathbf {G} _{k})_{,i}-(\mathbf {G} _{i}\cdot {\boldsymbol {C}}\cdot \mathbf {G} _{j})_{,k}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/626053366fba8dffc9ee988c8728f9b476cee63a)










![{\displaystyle [G^{ij}]=[G_{ij}]^{-1}~;~~[g^{\alpha \beta }]=[g_{\alpha \beta }]^{-1}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b6168f5195b650daf063a1dd26b314242926f774)









![{\displaystyle R_{\alpha \beta \rho }^{\gamma }:={\frac {\partial }{\partial X^{\rho }}}[\,_{(X)}\Gamma _{\alpha \beta }^{\gamma }]-{\frac {\partial }{\partial X^{\beta }}}[\,_{(X)}\Gamma _{\alpha \rho }^{\gamma }]+\,_{(X)}\Gamma _{\mu \rho }^{\gamma }\,_{(X)}\Gamma _{\alpha \beta }^{\mu }-\,_{(X)}\Gamma _{\mu \beta }^{\gamma }\,_{(X)}\Gamma _{\alpha \rho }^{\mu }=0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/29e1d54640569dc6ab58c0fca0c0ab634aef2180)






