Magnetic current
Flow of magnetic monopole charge

| Articles about |
| Electromagnetism |
|---|
 |
| Electrostatics
|
|
|
Magnetic current is, nominally, a current composed of moving magnetic monopoles. It has the unit volt. The usual symbol for magnetic current is , which is analogous to for electric current. Magnetic currents produce an electric field analogously to the production of a magnetic field by electric currents. Magnetic current density, which has the unit V/m2 (volt per square meter), is usually represented by the symbols and .[a] The superscripts indicate total and impressed magnetic current density.[1] The impressed currents are the energy sources. In many useful cases, a distribution of electric charge can be mathematically replaced by an equivalent distribution of magnetic current. This artifice can be used to simplify some electromagnetic field problems.[b][c] It is possible to use both electric current densities and magnetic current densities in the same analysis.[4]: 138




The direction of the electric field produced by magnetic currents is determined by the left-hand rule (opposite direction as determined by the right-hand rule) as evidenced by the negative sign in the equation[1]

Magnetic displacement current
Magnetic displacement current or more properly the magnetic displacement current density is the familiar term ∂B/∂t[d][e][f] It is one component of .[1][2] where

- is the total magnetic current.
- is the impressed magnetic current (energy source).
Electric vector potential
The electric vector potential, F, is computed from the magnetic current density, , in the same way that the magnetic vector potential, A, is computed from the electric current density.[1]: 100 [4]: 138 [3]: 468 Examples of use include finite diameter wire antennas and transformers.[5]
magnetic vector potential:

electric vector potential: where F at point and time is calculated from magnetic currents at distant position at an earlier time . The location is a source point within volume Ω that contains the magnetic current distribution. The integration variable, , is a volume element around position . The earlier time is called the retarded time, and calculated as







Retarded time accounts for the accounts for the time required for electromagnetic effects to propagate from point to point .
Phasor form
When all the functions of time are sinusoids of the same frequency, the time domain equation can be replaced with a frequency domain equation. Retarded time is replaced with a phase term. where and are phasor quantities and is the wave number.


Magnetic frill generator
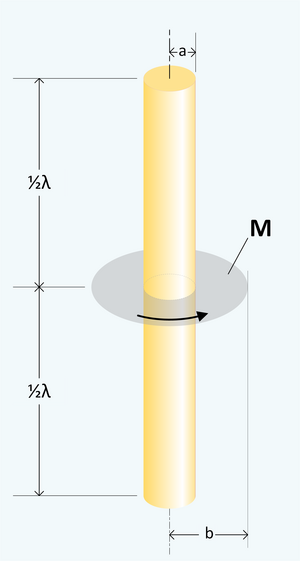
A distribution of magnetic current, commonly called a magnetic frill generator, may be used to replace the driving source and feed line in the analysis of a finite diameter dipole antenna.[4]: 447–450 The voltage source and feed line impedance are subsumed into the magnetic current density. In this case, the magnetic current density is concentrated in a two dimensional surface so the units of are volts per meter.
The inner radius of the frill is the same as the radius of the dipole. The outer radius is chosen so that where

- = impedance of the feed transmission line (not shown).
- = impedance of free space.


The equation is the same as the equation for the impedance of a coaxial cable. However, a coaxial cable feed line is not assumed and not required.
The amplitude of the magnetic current density phasor is given by: with where


- = radial distance from the axis.
- .
- = magnitude of the source voltage phasor driving the feed line.



See also
Notes
- ^ Not to be confused with magnetization M
- ^ "For some electromagnetic problems, their solution can often be aided by the introduction of equivalent impressed electric and magnetic current densities."[2]
- ^ "there are many other problems where the use of fictitious magnetic currents and charges is very helpful."[3]
- ^ "Because of the symmetry of Maxwell's equations, the ∂B/∂t term ... has been designated as a magnetic displacement current density."[2]
- ^ "interpreted as ... magnetic displacement current ..."[3]
- ^ "it also is convenient to consider the term ∂B/∂t as a magnetic displacement current density."[1]
References
- ^ a b c d e Harrington, Roger F. (1961), Time-Harmonic Electromagnetic Fields, McGraw-Hill, pp. 7–8, hdl:2027/mdp.39015002091489, ISBN 0-07-026745-6
- ^ a b c Balanis, Constantine A. (2012), Advanced Engineering Electromagnetics, John Wiley, pp. 2–3, ISBN 978-0-470-58948-9
- ^ a b c Jordan, Edward; Balmain, Keith G. (1968), Electromagnetic Waves and Radiating Systems (2nd ed.), Prentice-Hall, p. 466, LCCN 68-16319
- ^ a b c Balanis, Constantine A. (2005), Antenna Theory (third ed.), John Wiley, ISBN 047166782X
- ^ Kulkarni, S. V.; Khaparde, S. A. (2004), Transformer Engineering: Design and Practice (third ed.), CRC Press, pp. 179–180, ISBN 0824756533










